Erste Schritte - PhotoRobot Benutzersupport
Die PhotoRobot Controls App (auch als "CAPP" bezeichnet) ist darauf ausgelegt, Inhaltsproduktionsprozesse (Bilder, Videos, 360s und 3D-Modelle) zu automatisieren. Dieser Leitfaden besteht aus 4 Abschnitten, die jeweils den Prozess repräsentieren.
- EINRICHTUNG – Erstellen Sie einen Arbeitsbereich: Kameras, Hardware und Projekte
- CAPTURE - Steuern Sie PhotoRobot Hardware und Kameras, erfassen Sie Bilder und Videos
- EDIT - Visueller Inhalt nach dem Prozess
- PUBLISH - Generieren Sie Ausgabebilder in mehreren Formaten, "Verwalten Sie Profile"
Installieren der PhotoRobot Controls-App
Um die PhotoRobot Controls App auf Ihrem Computer zu installieren, melden Sie sich bei Ihrem PhotoRobot-Konto an und gehen Sie zu PhotoRobot Downloads.
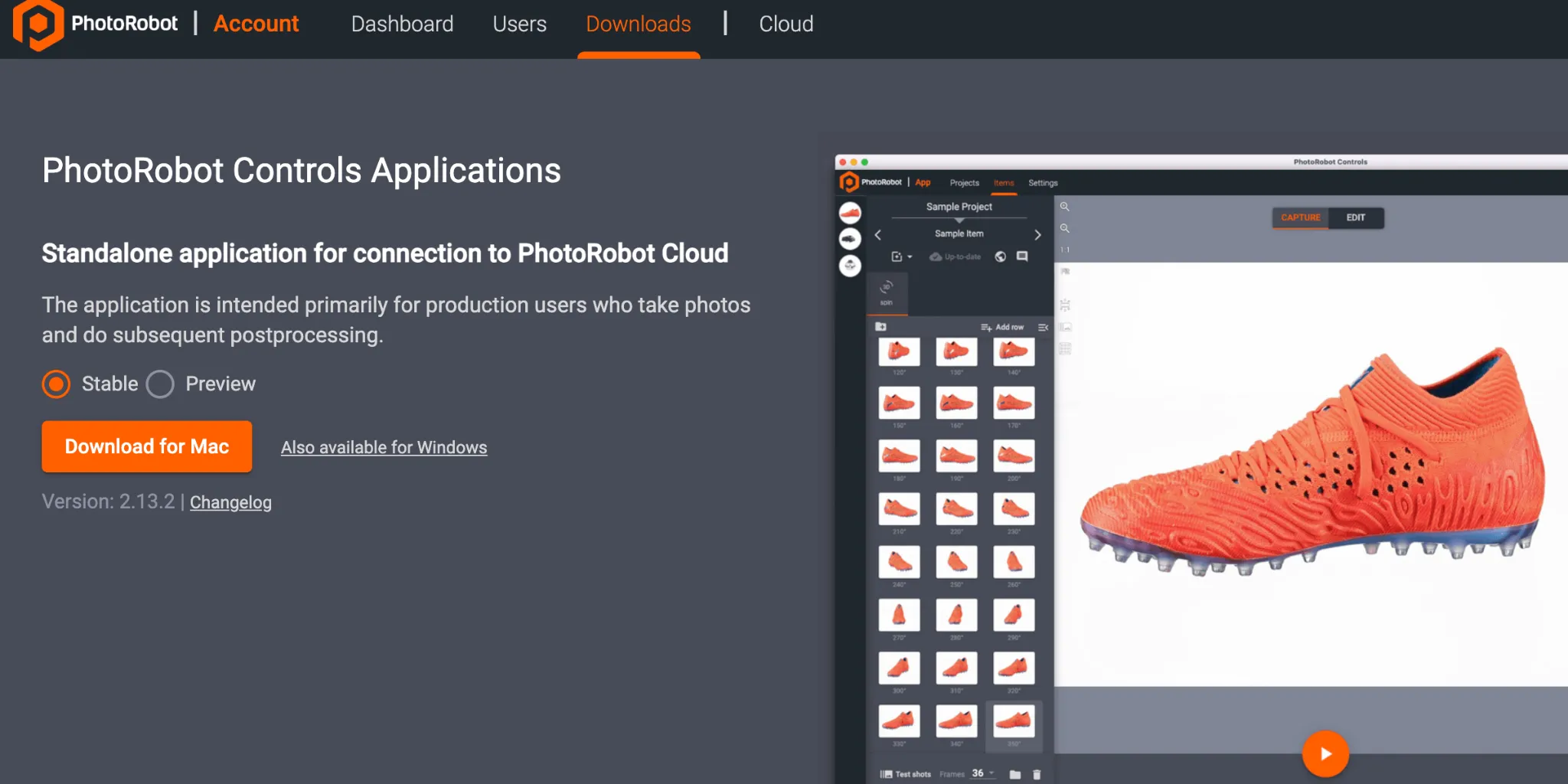
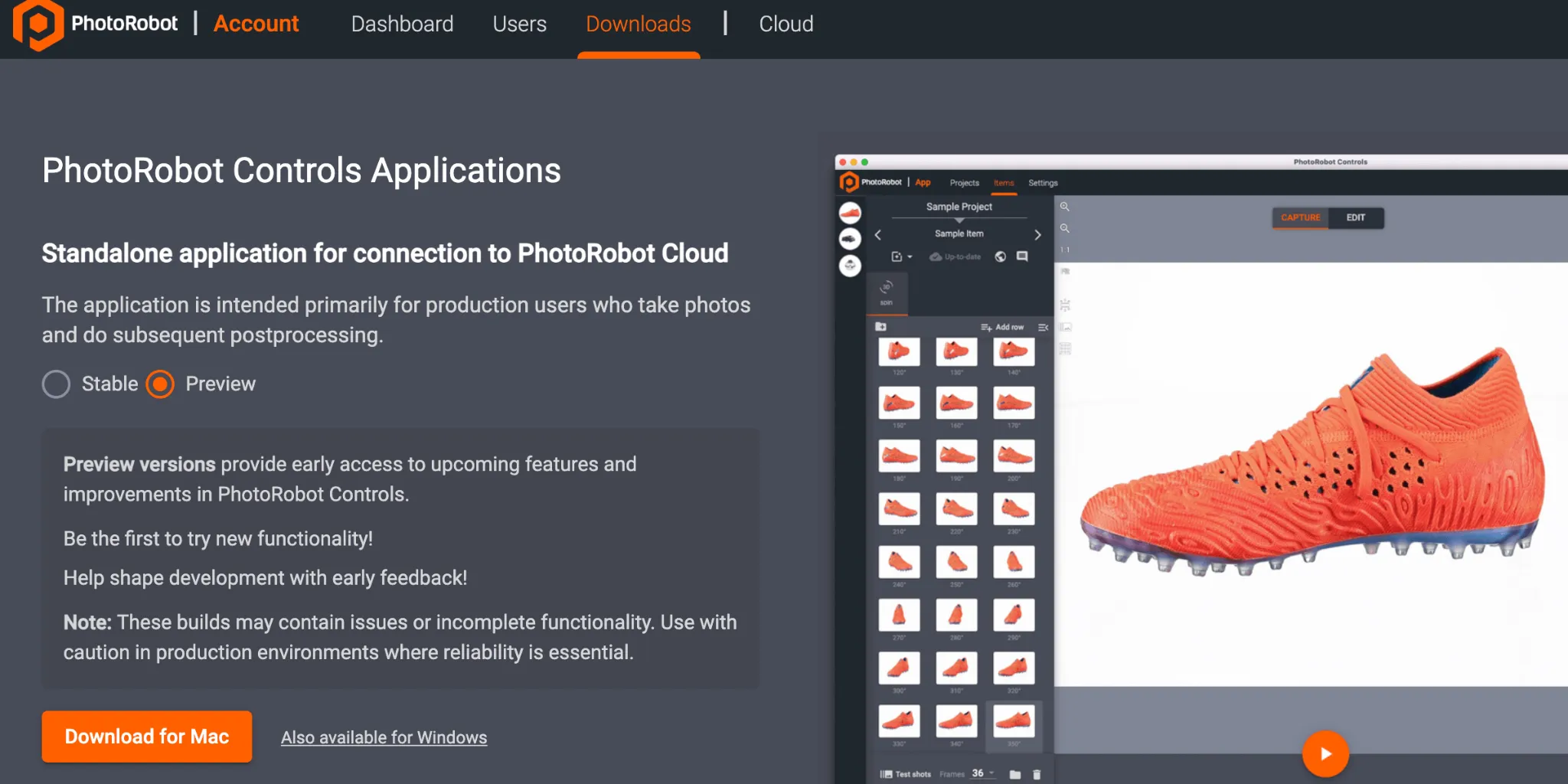
Anmerkung: Sowohl die stabile Version als auch eine Vorschauversion von CAPP stehen über den Installationsassistenten zum Download zur Verfügung. Die stabile Version enthält die neueste Version von CAPP und wird häufig veröffentlicht. In der Zwischenzeit bietet die Vorschauversion von CAPP frühzeitigen Zugriff auf die neuesten Funktionen und Fehlerbehebungen, die innerhalb weniger Tage nach der Entwicklung in die stabile Version übertragen werden. Auf diese Weise können Benutzer alle Probleme testen, die in der Vorschauversion auftreten, bevor sie sich an den Support wenden, da die meisten gemeldeten Probleme in der stabilen Version bereits in der Vorschauversion behoben wurden. Beachten Sie jedoch, dass die Vorschauversion nicht für den Produktionseinsatz empfohlen wird, bei dem die Stabilität ein kritischer Faktor ist. Die Vorschauversion befindet sich in aktiver Entwicklung, die möglicherweise noch unvollständige Funktionen oder ungelöste Fehler enthält.
Wichtig: Die älteren Versionen von CAPP sind aufgrund des Risikos einer Datenbankbeschädigung nicht für die Verteilung an Kunden oder die Öffentlichkeit vorgesehen. Ältere Versionen von CAPP sind nur für autorisierte PhotoRobot-Techniker für die interne Entwicklung oder für ganz spezielle Anwendungsfälle zugänglich.
Um die neueste stabile Version und die Vorschauversion von CAPP zu finden, siehe CAPP Neueste Download-Versionen.
Support und Fehlerbehebung bei der Selbstinstallation
Der Installationsvorgang beginnt mit dem Herunterladen der Installationsdatei.
Beachten Sie die Anforderungen für die Installation von CAPP:
- Der Benutzer muss auf dem Computer, auf dem CAPP installiert wird, über Administratorrechte verfügen.
- Der Computer muss alle System- und Hardwareanforderungen von PhotoRobot erfüllen.
- Auf dem Computer muss ein unterstütztes Betriebssystem mit den neuesten Updates ausgeführt werden.
Wichtig: Beachten Sie auch, dass CAPP nicht nur aus Robotersteuerungsfunktionen besteht, sondern auch aus Treibern für Kameras, Lichter und andere Peripheriegeräte. Dies hat zur Folge, dass die neueste Mac OS-Version oft nicht sofort unterstützt wird. In diesem Fall ist dies jedoch nur vorübergehend und so lange, bis alle relevanten Anbieter die kompatiblen Bibliotheken freigeben.
Dies mag zwar unpraktisch sein, ist aber weitaus weniger unangenehm als Kompatibilitätsprobleme bei der Verwendung von CAPP. Auch ein Downgrade ist noch komplizierter als die Vermeidung eines vorzeitigen Upgrades.
Nachdem die Betriebssystem- und Systemanforderungen erfüllt sind, wird die Installation über den Installationsassistenten fortgesetzt. Melden Sie sich beim PhotoRobot-Konto an und fahren Sie dann mit der Einrichtung fort, indem Sie die folgenden Schritte ausführen.
Einrichtung
Bestätigung der Benutzereinwilligung
Beim Herunterladen von CAPP erfordert die Aktivierung eines neuen Benutzerkontos die Bestätigung des Endbenutzer-Lizenzvertrags (EULA) und anderer zugehöriger Dokumente durch den Benutzer.
Nach der Kontoaktivierung ist es dann möglich, Ihre übermittelten Einwilligungsinformationen über die Cloud-Version von CAPP in den Einstellungen des Kontoprofils zu überprüfen.
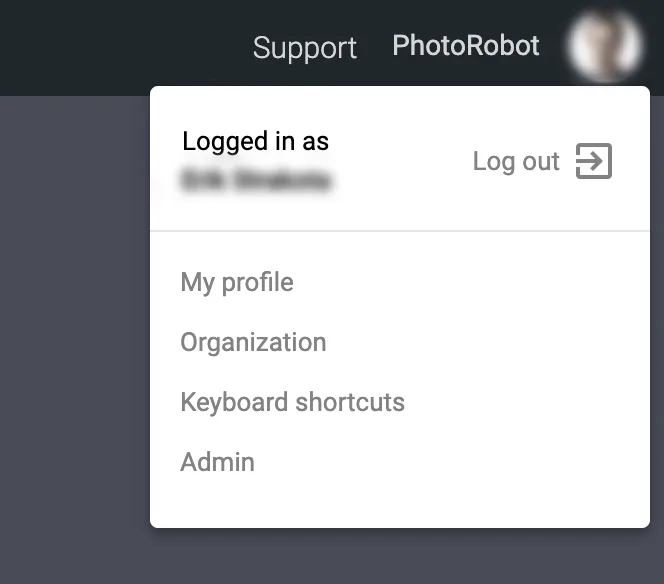
Um Ihre Einwilligungsinformationen zu überprüfen, öffnen Sie die Cloud-Version von CAPP und klicken Sie auf das Benutzerkontosymbol in der oberen rechten Ecke der Benutzeroberfläche. Wählen Sie anschließend Mein Profil aus den Menüoptionen aus.

Im Profilmenü werden das Profilfoto, allgemeine Benutzerinformationen (Name, Telefon, Firma), Passworteinstellungen und die Einwilligungsinformationen angezeigt. Zu den Einwilligungsinformationen gehören:
- Hostname des Computers
- Vereinbarter Termin
- Lizenzvereinbarung für das internationale PhotoRobot-Programm
- Zustimmung zur Verarbeitung personenbezogener Daten
- Informationen über die Verarbeitung personenbezogener Daten
Kompatible Kameras
Wichtig: Um sicherzustellen, dass CAPP ordnungsgemäß mit der Kamera kommuniziert, schließen Sie bitte alle anderen Programme, die eine Verbindung zur Kamera herstellen. Stellen Sie außerdem sicher, dass Sie eine kompatible Kamera aus der Liste der PhotoRobot-kompatiblen Kameramodelle verwenden.
Hinweis: Seit der Veröffentlichung der PhotoRobot Controls App 2.5.4 kann nun jede Kamera über eine Drittanbieter-Kameraintegration unterstützt werden. Für die automatisierte Fotografie sind jedoch die neuesten spiegellosen Canon-Kameramodelle am zuverlässigsten und effizientesten.
Obwohl es möglich ist, die von PhotoRobot empfohlenen Handkameras über WLAN oder eine Kabelverbindung zu verwenden, kann dies zu Problemen führen.
- Es kann häufig zu WLAN-Unterbrechungen kommen (hauptsächlich aufgrund einer Zeitüberschreitung). Diese erfordern zeitaufwändige Wiederverbindungen zum System.
- Bei der Verwendung einer Handkamera über eine Kabelverbindung besteht die Komplikation der Kabellängen und das Risiko für die Verbindungen.
Für die iPhone-Verbindung über die PhotoRobot Touch App ist zu beachten, dass keine dieser Probleme auftreten. Das iPhone wird in der Lage sein, Handkamera in einem Setup mit kontinuierlicher Beleuchtung zu fotografieren. Wenn jedoch Blitzfotografie notwendig ist, können kompatible Handkameras als Alternative zu den empfohlenen spiegellosen Kameras dienen. Behalte nur die Probleme im Hinterkopf, die bei WLAN und kabelgebundenen Handheld-Modellen auftreten können.
Kompatible Leuchten
Damit CAPP mit der Beleuchtung kommunizieren kann, sollten Sie unbedingt PhotoRobot-kompatible Studiolampen verwenden. Dazu gehören zwei Arten von Lichtern: Stroboskoplichter von FOMEI und Broncolor sowie alle Arten von LED-Lichtern mit DMX-Unterstützung.
Remote-Support-Einrichtung
Unmittelbar nach der Installation von PhotoRobot Controls wird empfohlen, dass der Nutzer die Splashtop SOS (EU-Region) App herunterlädt und installiert. Splashtop SOS (EU) ermöglicht es PhotoRobot-Technikern, auf den Computer eines Kunden zuzugreifen und technische Unterstützung zu leisten, nachdem der Benutzer für einen bestimmten Fall die Erlaubnis erteilt hat.
Das Herunterladen von Splashtop SOS gleichzeitig mit PhotoRobot Controls hilft, Verzögerungen bei technischen Remote-Anfragen zu vermeiden. Nehmen wir zum Beispiel, wenn ein Benutzer nicht genügend Rechte hat, um die Anwendung zu installieren. Nach der Installation von Splashtop können unsere Techniker sofort Splashtop Business nutzen, um mit der technischen Supportanfrage auf den Computer zuzugreifen.
Beachten Sie jedoch, dass der Nutzer die EU-Region-Version der Splashtop SOS-App herunterladen muss. Die US-Region-Version ermöglicht es unseren Technikern nicht, auf Ihren Computer zuzugreifen.
Bitte stellen Sie daher sicher, dass Sie den folgenden EU-Region-Link nutzen, um Splashtop SOS herunterzuladen:
Hinweis: Weitere Informationen zur Einrichtung der Fernunterstützung für PhotoRobot-Systeme finden Sie unter PhotoRobot Remote Support Setup.
Erstellen eines Arbeitsbereichs
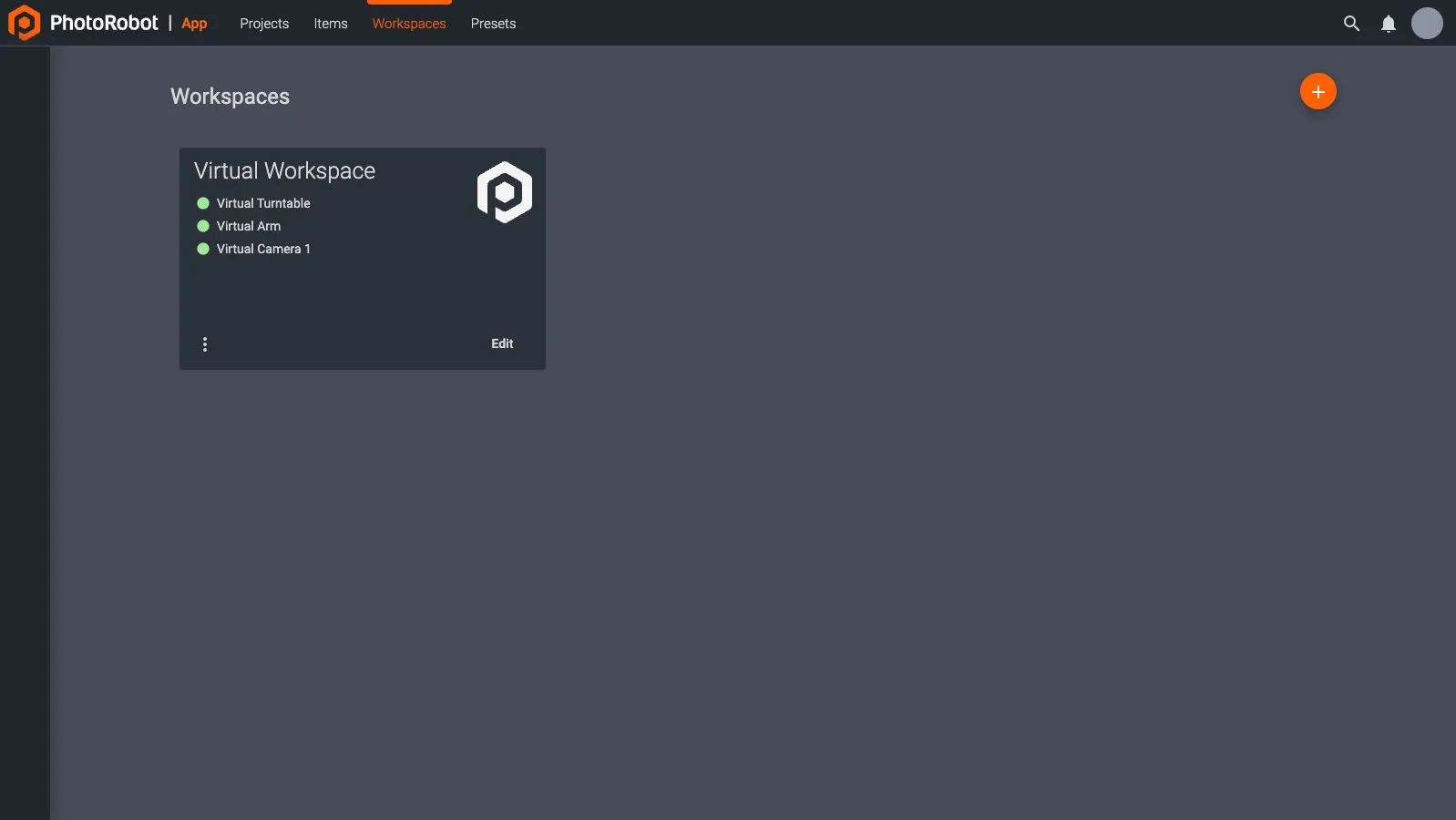
Nach dem Öffnen von CAPP erstellt ein Benutzer in der Regel als Erstes einen Arbeitsbereich. Ein Arbeitsbereich ist eine Liste der Hardware, die für ein bestimmtes Fotoshooting verwendet wird. Es kann verschiedene PhotoRobot Module, Kameras, Leuchten und anderes Zubehör enthalten.
Zu Demozwecken können Benutzer mit einem vordefinierten Beispielarbeitsbereich arbeiten, der für die Verwendung virtueller Hardware konfiguriert ist. Auf diese Weise können Benutzer weiterhin mit verschiedenen Funktionen von CAPP experimentieren, indem sie virtuelle Roboter und Kameras auswählen.
Anschließen von Hardware
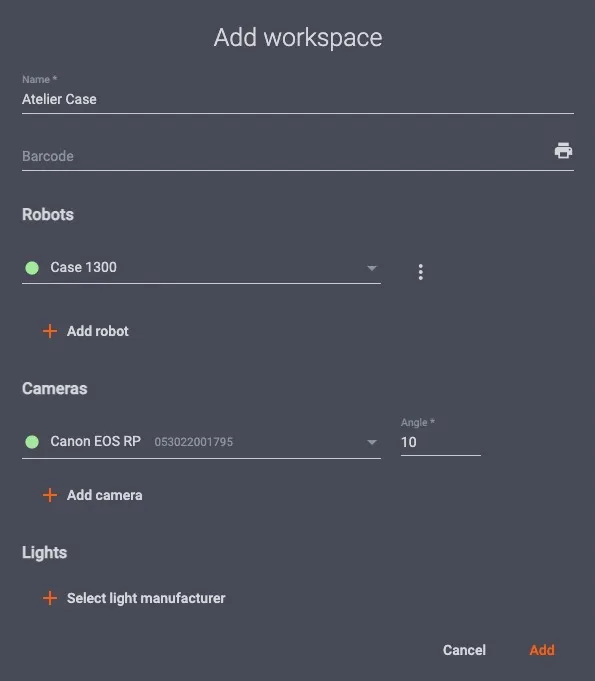
Um mit der Verwendung von tatsächlicher (im Gegensatz zu virtueller) Hardware zu beginnen, stellen Sie zunächst sicher, dass die Hardware mit demselben Computernetzwerk (oder einem Subnetzwerk) verbunden ist wie der Computer, den Sie zur Steuerung Ihres PhotoRobot verwenden.
Hinweis: Seit PhotoRobot Controls Version 2.5.4 kann nun jede Kamera durch Drittanbieter-Kameraintegration unterstützt werden. Zu den kompatiblen Kameras gehören hingegen eine Reihe von Canon-Kameramodellen, unsere empfohlenen Wi-Fi-fähigen Canon-Kameras sowie iPhone-Kameras, wenn die PhotoRobot Touch App verwendet wird.
Wichtig: Für automatisierte Fotografie mit robotischer Arbeitsstation sind die von PhotoRobot empfohlenen spiegellosen Canon Camera-Modelle die zuverlässigsten. Obwohl es Unterstützung für Handkameras über WLAN oder Kabelverbindung gibt, kann deren Nutzung Probleme verursachen. Dazu gehören häufige Wi-Fi-Unterbrechungen (hauptsächlich aufgrund von Timeouts), Komplikationen bei den Kabellängen und das Risiko für Verbindungen.
Um eine Kamera anzuschließen, muss sie auf eine von drei Arten mit demselben lokalen Computernetzwerk wie der Roboter verbunden sein:
- Direkte Verbindung über USB mit dem lokalen Netzwerk;
- Anschluss einer empfohlenen Handheld-Kamera über ein spezielles Wi-Fi-Protokoll (zugänglich in der Canon Tool-Anwendung auf der Canon Entwicklerseite);
- Integration eines oder mehrerer iPhones über die PhotoRobot Touch Applikation. (Anweisungen zur Verwendung eines iPhone mit PhotoRobot finden Sie im Benutzerhandbuch der iPhone Touch App.)
Nachdem Sie ein Gerät (oder eine Kamera) an einen Arbeitsplatz angeschlossen haben, können Sie prüfen, ob er online ist (von CAPP erkannt). Dazu inspizieren Sie den Punkt links neben dem Namen des jeweiligen Geräts. Wenn das Gerät erkannt wird, erscheint ein grüner Punkt.
Ein grauer Punkt neben dem Gerätenamen signalisiert, dass die Hardware nicht erkannt wurde oder nicht eingeschaltet ist. Wenn ein roter Punkt vorhanden ist, gibt es einen Fehler, zum Beispiel dass der Benutzer die Kamera nicht in den manuellen Modus schaltet. Um die Ursache des Fehlers zu identifizieren, fahren Sie mit der Maus über den roten Punkt, um ein Tooltip mit einer Beschreibung des auftretenden Fehlers anzuzeigen.
Für die vollständige Schritt-für-Schritt-Anleitung zum Anschluss von Hardware zur Einrichtung eines Arbeitsbereichs siehe Einrichten eines PhotoRobot-Arbeitsbereichs.
Wenn Sie Probleme haben, wenden Sie sich bitte an PhotoRobot Troubleshooting für häufige Probleme und deren Lösungen.
Einrichten der Roboterarmhöhe
Wenn Sie einen Roboterarm im Arbeitsbereich verwenden, beachten Sie, dass wahrscheinlich eine zusätzliche Einrichtung erforderlich ist. Dies liegt daran, dass es sich bei dem Roboterarm um eine eigenständige Maschine handelt, und eine der Funktionen der Steuerung über CAPP besteht darin, dass die Höhenbewegung die Rotationsachse auf den Mittelpunkt der Höhe des fotografierten Objekts ausrichtet.
Die Höhe der Drehachse des Roboterarms wird durch den Maschinentyp des Arbeitsplatzes und gleichzeitig durch die Verstellung der Nivellierfüße bestimmt, die eventuelle Unebenheiten des Bodens ausgleichen. Wenn alles richtig eingerichtet ist, ist die Maschine waagerecht und das Rotationszentrum befindet sich auf einer bestimmten Höhe über dem Boden. Die Gesamthöhe hängt jedoch auch von der Höhe der Drehtelleroberfläche ab, die zwischen verschiedenen Robotern variiert. Das bedeutet, dass es zu einer Diskrepanz in der Höhenreferenz kommen kann, da sich unter der Säule des Roboterarms ein Höhenadapter befindet, so dass er ungefähr ausgerichtet ist.
Um eine perfekte Ausrichtung zu gewährleisten, ist es dann notwendig, den Höhenunterschied zwischen Arm und Drehteller in CAPP einzugeben. Der Höhenunterschied misst den genauen Abstand zwischen der Rotationsachse des Roboterarms und der Höhe, in der die Oberfläche des Drehtellers (einschließlich eines darauf platzierten zusätzlichen Bretts) positioniert ist. Daraus ergeben sich die exakten Maße, aus denen das System die Hälfte der Höhe des Objekts berechnet, und die Position, an der sich der Arm bewegen soll. Es stellt auch sicher, dass das System so eingestellt ist, dass es automatisch und korrekt funktioniert.
Beachten Sie auch: Das System ist so eingestellt, dass Werte abgelehnt werden, die außerhalb des gültigen Bereichs für eine bestimmte Einrichtung liegen.
Stell den Roboterarm-Aufzug auf Null-Ebene ein
Um den Robot Arm-Aufzug auf Nulllevel zu stellen, öffnen Sie zunächst die lokale Version von CAPP und greifen auf zwei Arten auf die Arbeitsbereichseinstellungen zu:
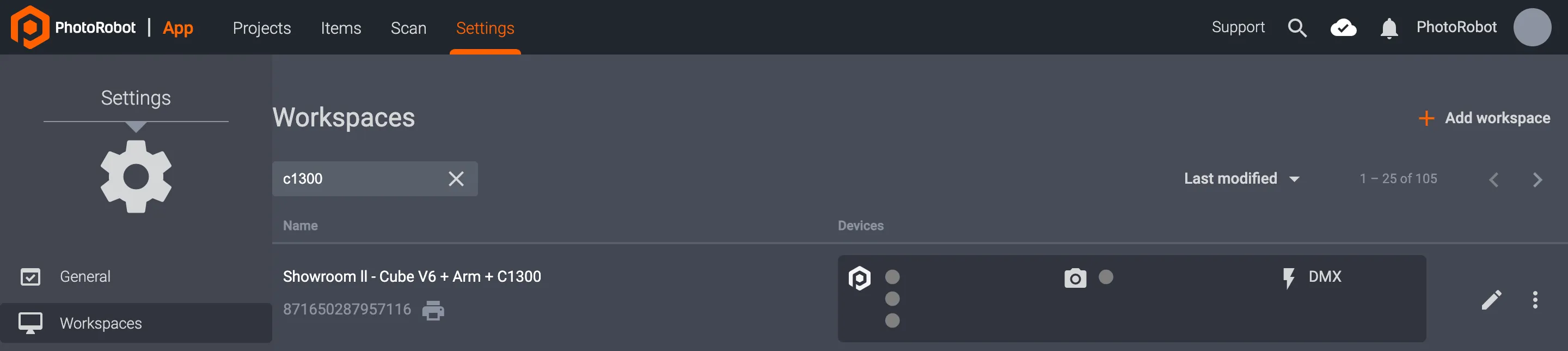
1. Öffnen Sie die lokale Version von CAPP, klicken Sie oben in der Benutzeroberfläche auf Einstellungen und wählen Sie Arbeitsbereiche aus den Menüoptionen auf der linken Seite. Suchen Sie in diesem Menü den Arbeitsbereich, der in Betrieb ist, und klicken Sie auf das Bearbeitungssymbol neben dem Titel des Arbeitsbereichs, um die Arbeitsbereichseinstellungen bearbeiten zu öffnen:
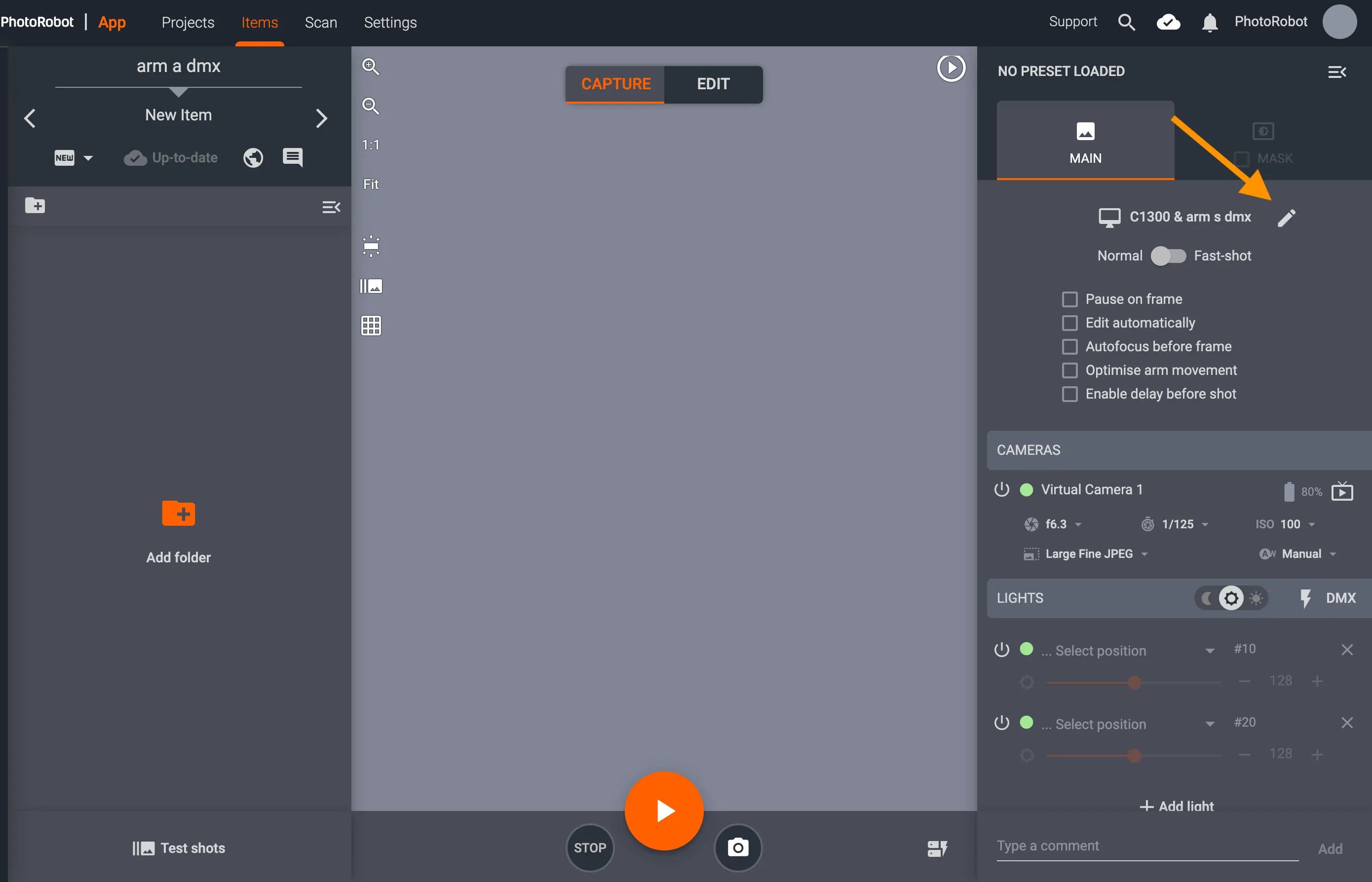
2. Alternativ ist es möglich, auf das Menü Arbeitsbereich bearbeiten zuzugreifen, indem Sie ein Element im Aufnahmemodus in der lokalen Version von CAPP öffnen und dann auf das Bearbeitungssymbol neben dem Titel des Arbeitsbereichs auf der rechten Seite der Benutzeroberfläche klicken:
Beide Methoden öffnen die Einstellungen des Arbeitsbereichs "Bearbeiten". Um dann den Roboterarm zu konfigurieren, suchen Sie das Gerät im Menü Roboter und klicken Sie auf die 3 vertikalen Punkte neben dem Namen des Roboterarms.
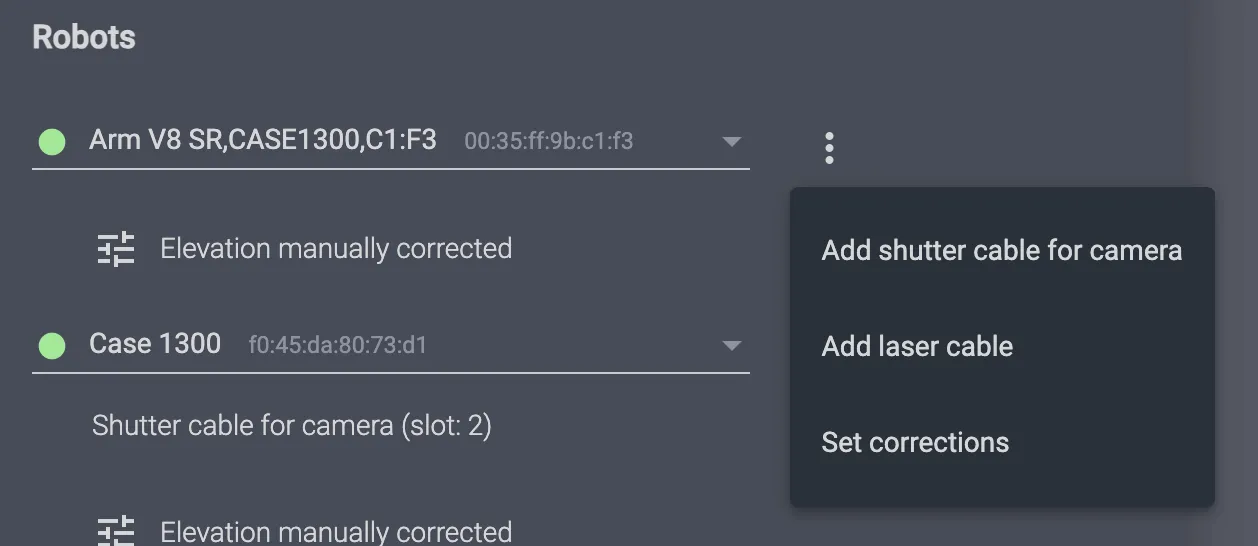
Wählen Sie anschließend die Menüoption Korrekturen einstellen , um die Funktion Aufzugskorrektur einstellen zu öffnen:
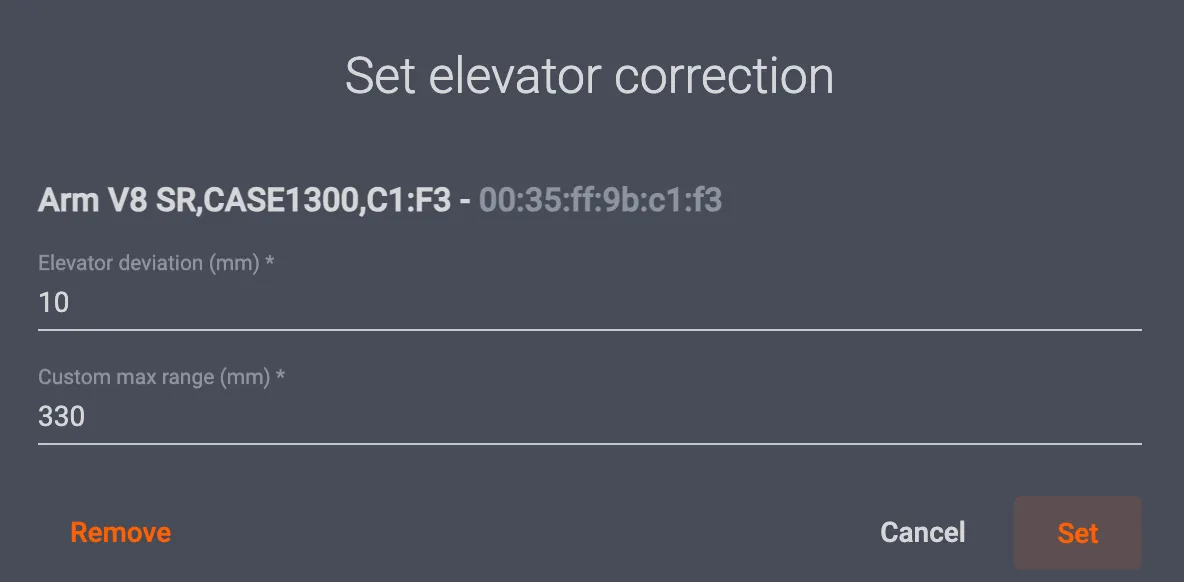
Passen Sie im Menü Höhenruderkorrektur einstellen die Zahl im oberen Feld Höhenruderabweichung (mm) an, um die Höhe der Kamera auf den entsprechenden Nullpunkt zu setzen. Wenn sich die Kamera z. B. 10 mm über dem Tisch nicht mittig befindet, legen Sie die Aufzugsabweichung auf -10 mm fest, um die Kamera zu zentrieren.
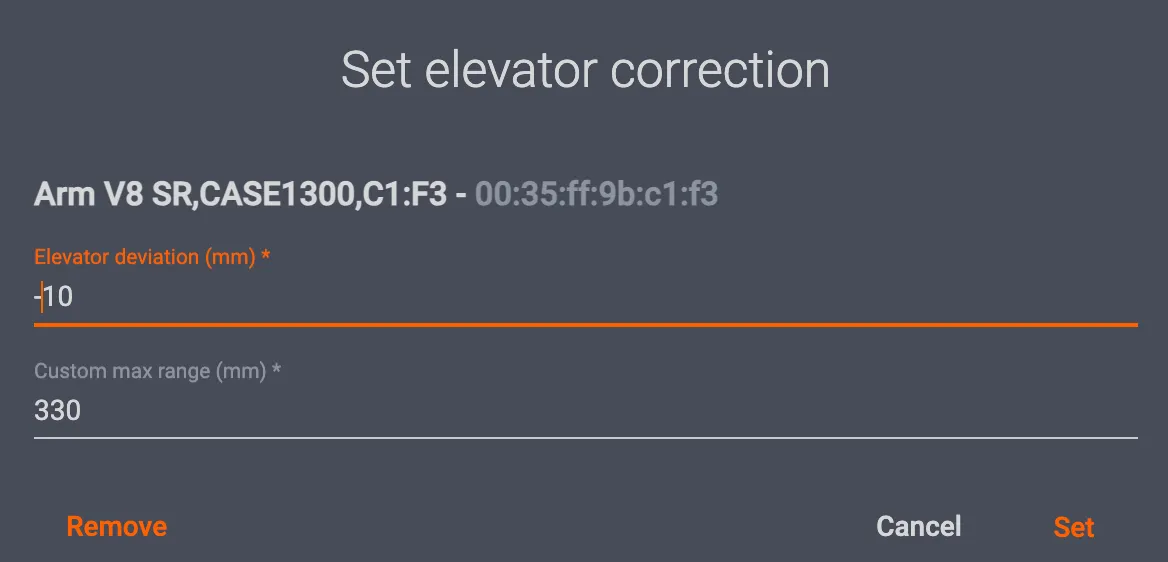
Wenn sich die Kamera 10 mm unter dem Tisch nicht mittig befindet, stellen Sie die Höhenruderabweichung auf +10 mm ein. Dadurch wird die Höhe der montierten Kamera am Roboterarm korrekt auf das entsprechende Nullniveau in der Software ausgerichtet.
Anmerkung: Der Hub kann maximal 330 mm erreichen. Wenn also der Nullpunkt um +30 mm eingestellt wird, kann der maximale Hub nur 300 mm erreichen. Das bedeutet, dass das System nur in der Lage sein wird, Produkte zu erfassen, die um diesen Spielraum kleiner sind, d. h. 30 mm oder weniger.
Verwalten von Dateien - Projekte, Elemente und Ordner
In CAPP werden Bilder in Projekten, Elementen und Ordnern organisiert.
- Ein Projekt ist die Datenentität der höchsten Ebene. In der Regel enthält ein Projekt Elemente aus einem einzelnen Fotoshooting oder vielleicht einem einzelnen Aufnahmetag / einer einzelnen Woche.
- Projekte bestehen aus einem oder mehreren Elementen. Ein einzelner Gegenstand ist in der Regel ein bestimmtes, fotografiertes Objekt.
- Ein Element enthält einen oder mehrere Ordner. In CAPP können Sie mehrere Ordner in einem einzigen Element haben, um verschiedene Arten von Bildern getrennt zu halten. Ein sehr häufiges Beispiel ist die Verwendung eines Ordners für eine um 360 ° drehende Präsentation (genannt "Spin"), während ein anderer zum Speichern von Standbildern ("Standbildern") verwendet wird.
Um mit der Aufnahme zu beginnen, müssen Sie zunächst ein neues Projekt hinzufügen (es sei denn, Sie haben bereits eines, das Sie verwenden möchten) sowie mindestens ein Element.
( ! ) - Wenn Probleme auftreten, finden Sie zusätzliche Unterstützung zum Anschließen von Kameras, Robotern, Lichtern und zur Bearbeitung im PhotoRobot Fehlerbehebungshandbuch.
Allgemeine Einstellungen - Cloud Auto Backup, Verarbeitung, Touch App
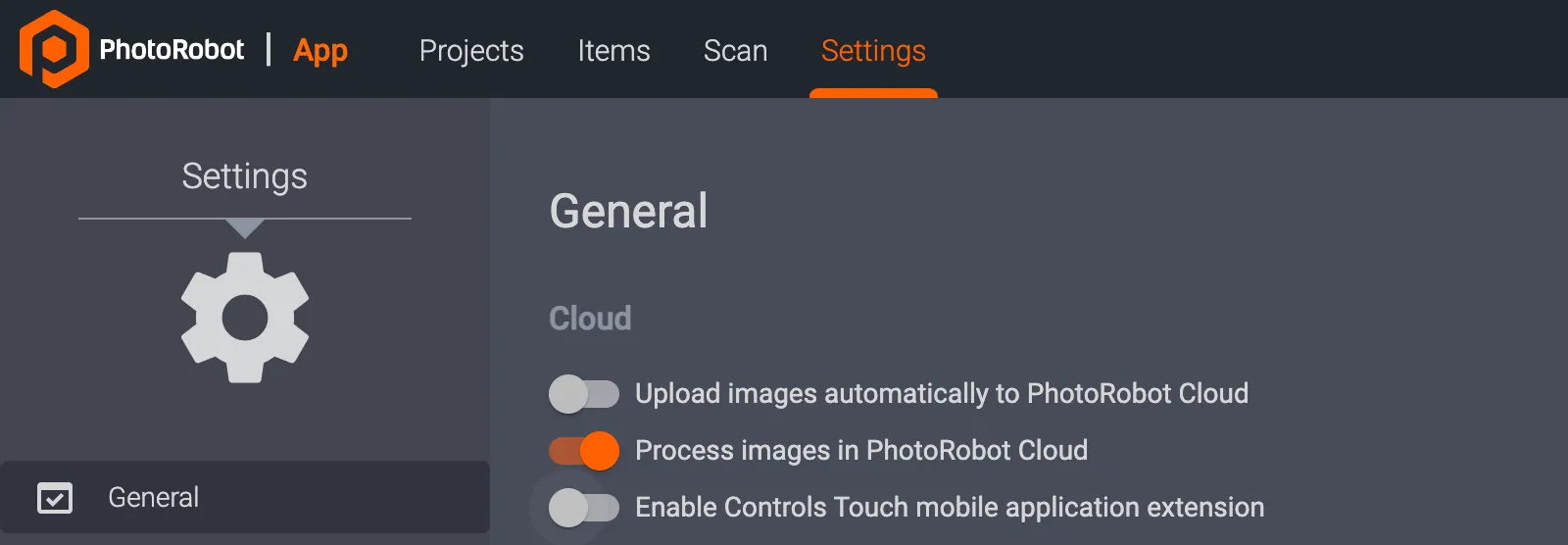
In der lokalen Desktop-Version von CAPP gibt es 3 allgemeine Einstellungen, die ein- oder ausgeschaltet werden können:
- Automatisches Hochladen von Bildern in die PhotoRobot Cloud
- Verarbeiten Sie Bilder in PhotoRobot Cloud
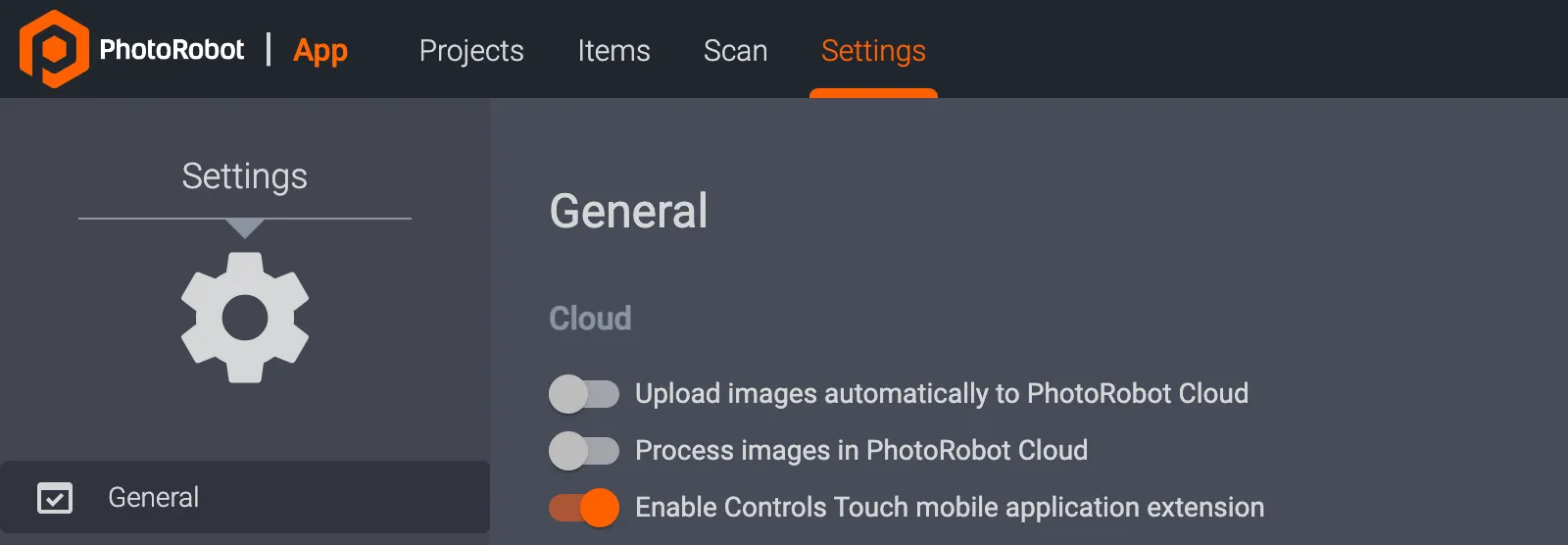
- Aktivieren der Controls Touch Mobile Application Extension
Standardmäßig ist die lokale App auf Bilder automatisch in PhotoRobot Cloud hochladen eingestellt. Diese Funktion speichert automatisch eine Sicherung der aufgenommenen Bilder auf Ihrem Cloud-Server, um sie später zu exportieren.
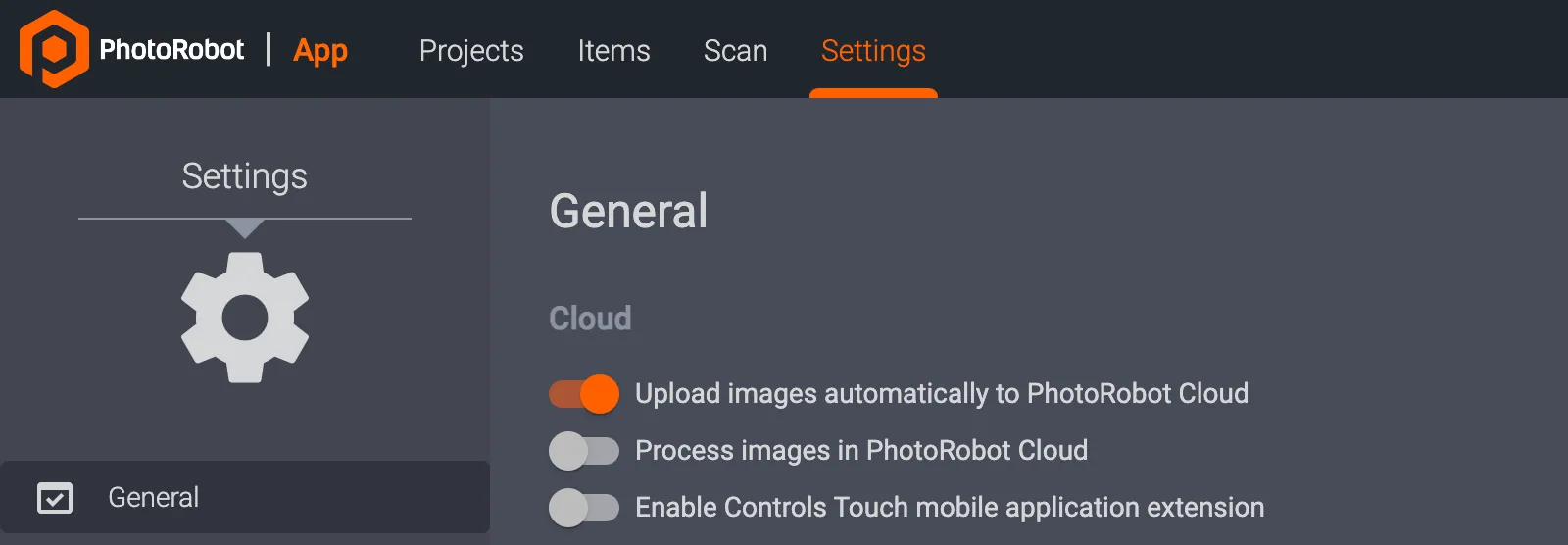
Um das automatische Hochladen von Bildern in PhotoRobot Cloud zu deaktivieren, deaktivieren Sie die Option in der lokalen Version der allgemeinen Einstellungen von CAPP. Dadurch werden erfasste Elemente stattdessen in Ihrer lokalen App oder in Ihrem eigenen Cloud-Konto gespeichert.
Verwenden Sie die Umschalter auch, um die Funktion Bilder in PhotoRobot Cloud verarbeiten zu aktivieren oder zu deaktivieren. Wenn diese Funktion aktiviert ist, werden Bilder nach der Aufnahme automatisch gemäß den Voreinstellungen in der PhotoRobot Cloud nachbearbeitet.
Wenn Sie die PhotoRobot Touch Mobile App für iPhone verwenden, aktivieren Sie die Option Enable Controls Touch Mobile Application Extension.
Anmerkung: Technische Anweisungen zur Installation und zum Betrieb von PhotoRobot Touch finden Sie im Benutzerhandbuch der PhotoRobot iPhone Touch App.
Allgemeine Einstellungen - Neues Element automatisch erstellen
Zusätzlich gibt es in den allgemeinen Einstellungen in der lokalen Desktop-Version von CAPP die Barcode-Scanner-Einstellungen , die die Konfiguration erweiterter Optionen für den Barcode-Leser ermöglichen. Verwenden Sie den Schalter links neben Automatisch einen neuen Artikel im System erstellen, wenn ein unbekannter Barcode gescannt wird , um die automatische Artikelerstellung zu aktivieren oder zu deaktivieren.
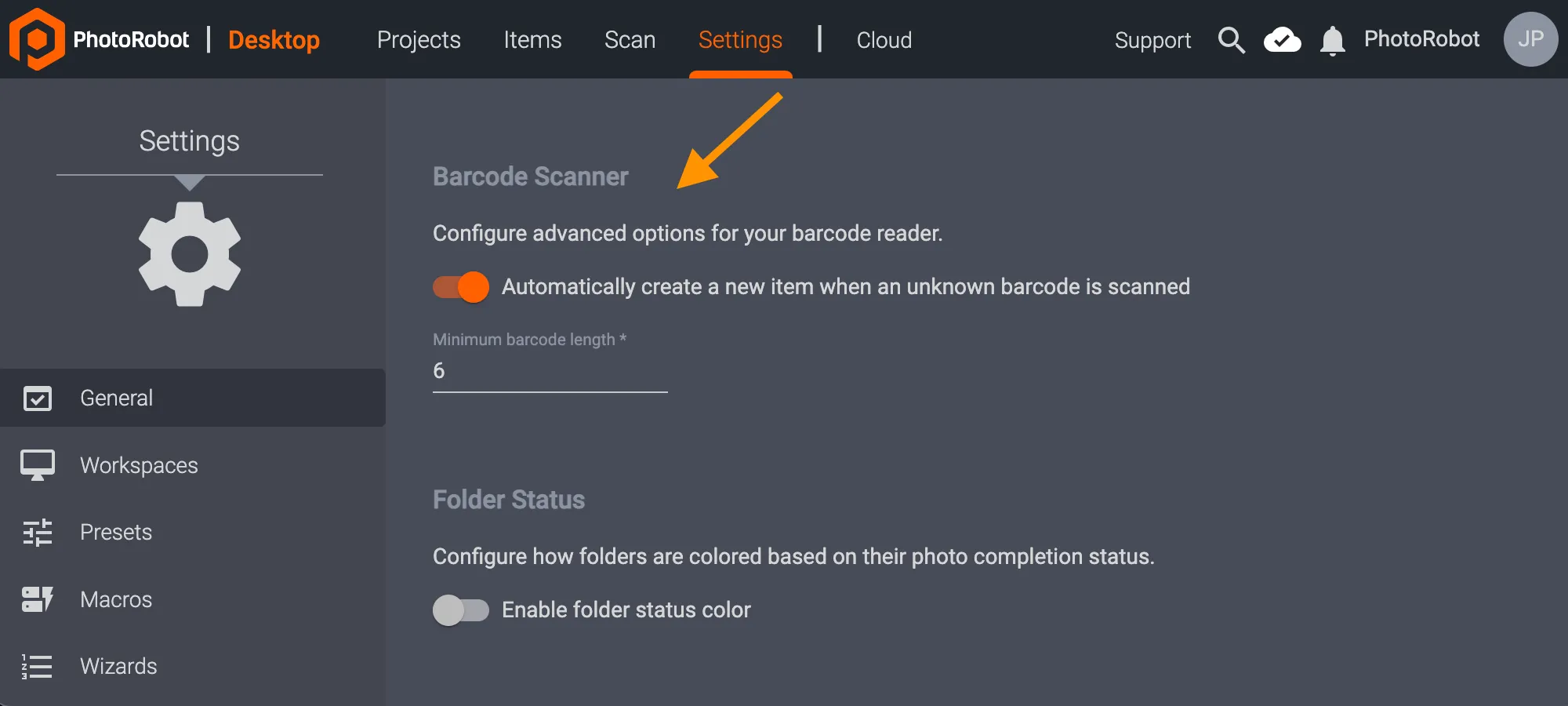
Wenn diese Einstellung aktiviert ist, fungiert sie als Alternative zur manuellen Elementerstellung. Es ermöglicht die Identifizierung eines Artikels am Ort der Erfassung (typischerweise über Barcode oder QR-Code). Ein Bediener scannt einfach einen unbekannten Code, und ein neues Element wird automatisch im Projekt erstellt. Die Benennung des Elements erfolgt entsprechend der gescannten Zeichenfolge und im Kennungsfeld des Elements. Dann fotografiert der Bediener den Gegenstand.
Auf diese Weise ist es nicht erforderlich, inventarbezogene Vorgänge innerhalb der Studiosoftware durchzuführen. Es reicht z.B. aus, einen neuen Artikel zu scannen und anschließend einen voreingestellten (Regal-)Code für die Fotografie zu scannen (z.B. für weiße, dunkle oder bunte Artikel). Das System liefert dann automatisch und sofort einen vollständigen Satz von Fotos, bearbeitet sie vollständig nach und verteilt sie mit automatischer Benennung an das Zielsystem.
Darüber hinaus gibt es ab der CAPP-Version 2.13.beta58 nun die Möglichkeit, die minimale String-Länge für Barcodes zu konfigurieren. Zuvor betrug die Mindestlänge eines Barcodes / QR-Codes 6 Zeichen (um unter anderem doppelte Interpretationen der gescannten Zeichenfolge zu vermeiden). Jetzt ist die Einstellung Minimale Barcode-Länge anpassbar, sodass z. B. vierstellige Identifikatoren ohne weitere Anpassungen funktionieren können.
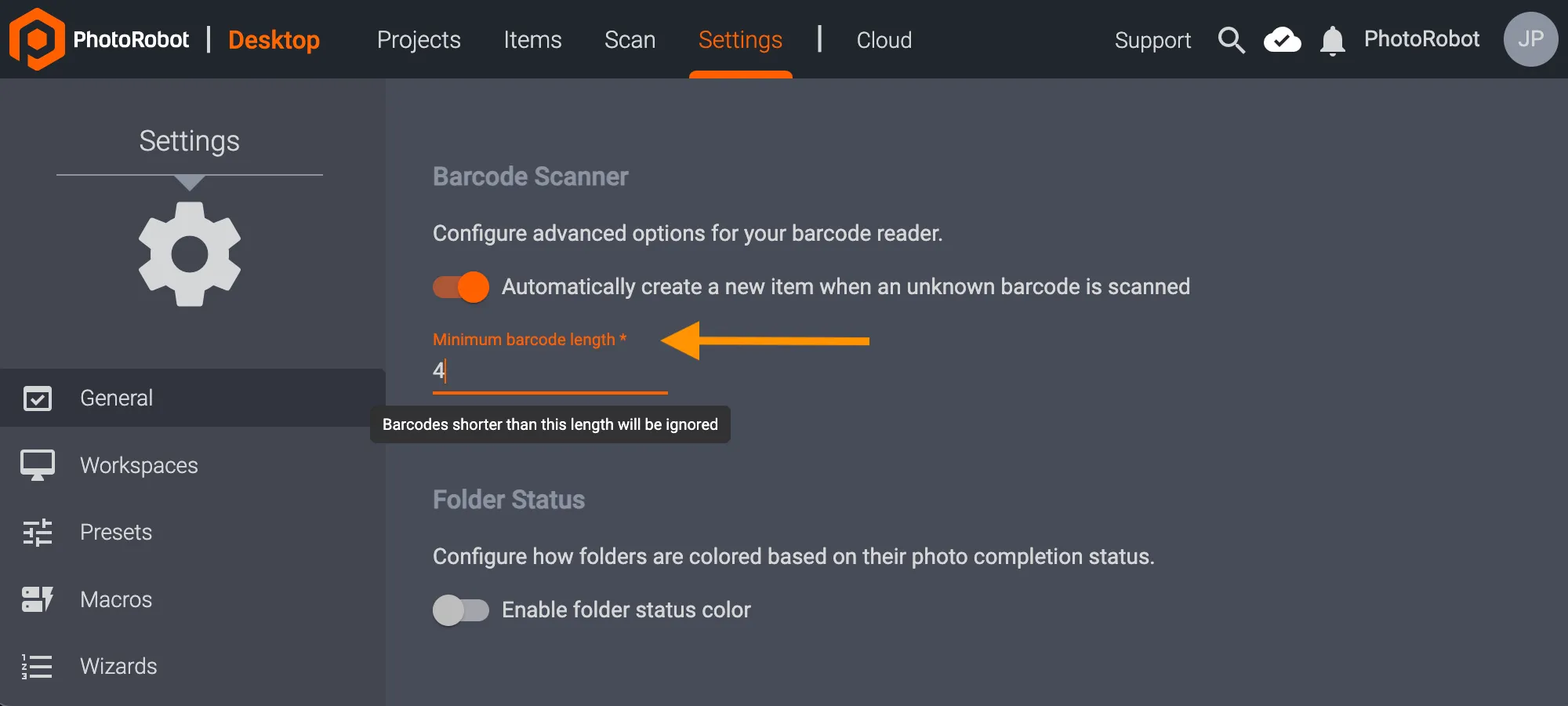
Um die minimale Zeichenfolgenlänge für Barcodes / QR-Codes anzupassen, konfigurieren Sie die minimale Barcode-Länge auch in der lokalen Version von CAPP in den Allgemeinen Einstellungen - Barcode-Scanner. Barcodes, die kürzer als die eingegebene Länge sind, werden dann vom System ignoriert.
Anmerkung: Nachdem einem Artikel im System ein Barcode zugewiesen wurde, ist der Barcode auch direkt in der Oberfläche des Erfassungsmodus im Artikelinformationsbereich über eine Barcode-Schaltfläche zugänglich.
Externen Kundenzugriff auf Projektdaten gewähren
Um mit Kunden außerhalb der Organisation eines kostenpflichtigen CAPP-Kontos zu arbeiten, kann ein Administrator des Kontos kostenlos Kundenkonten erstellen. Kundenkonten ermöglichen es einem externen Kunden, Projektdaten einzusehen, sich durch Überprüfung und Kommentare an der Qualitätssicherung zu beteiligen und auf Projekt-Assets zum Download zuzugreifen. Diese Funktion ist für Situationen gedacht, in denen ein Fotostudio mit einem externen Kunden zusammenarbeitet, der Zugriff auf bestimmte Aufträge benötigt.
Um ein Projekt mit einem Kunden außerhalb Ihres Unternehmens zu teilen, stellen Sie zunächst sicher, dass Sie sich mit einem Benutzerprofil mit Administratorrechten bei der Cloud-Version von CAPP anmelden.
1. Melden Sie sich mit einem kostenpflichtigen CAPP-Kontoprofil mit Administratorrechten bei der Cloud-basierten App an und klicken Sie auf das Menüsymbol für das Benutzerprofil in der oberen rechten Ecke des Dashboards. Klicken Sie dann auf Organisation , um auf das Administrationspanel zuzugreifen.
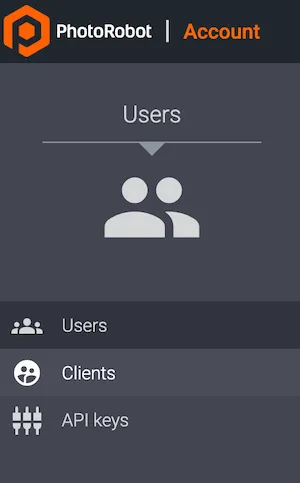
2. Klicken Sie anschließend in der Organisationsverwaltung in den Kontooptionen oben auf der Benutzeroberfläche auf Benutzer .

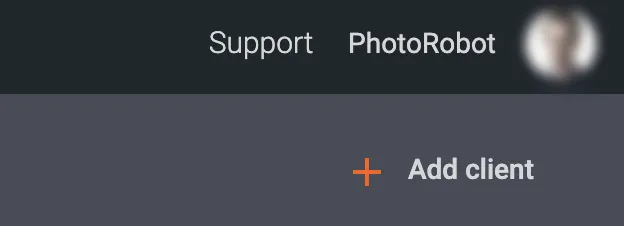
3. Klicken Sie auf Clients , um eine neue Benutzeroption für den Zugriff auf die Funktion "Clients hinzufügen" über die Kontooberfläche zu erstellen. Die Schaltfläche + Kunden hinzufügen wird oben rechts im Dashboard unter dem Symbol für das Benutzerprofil angezeigt.
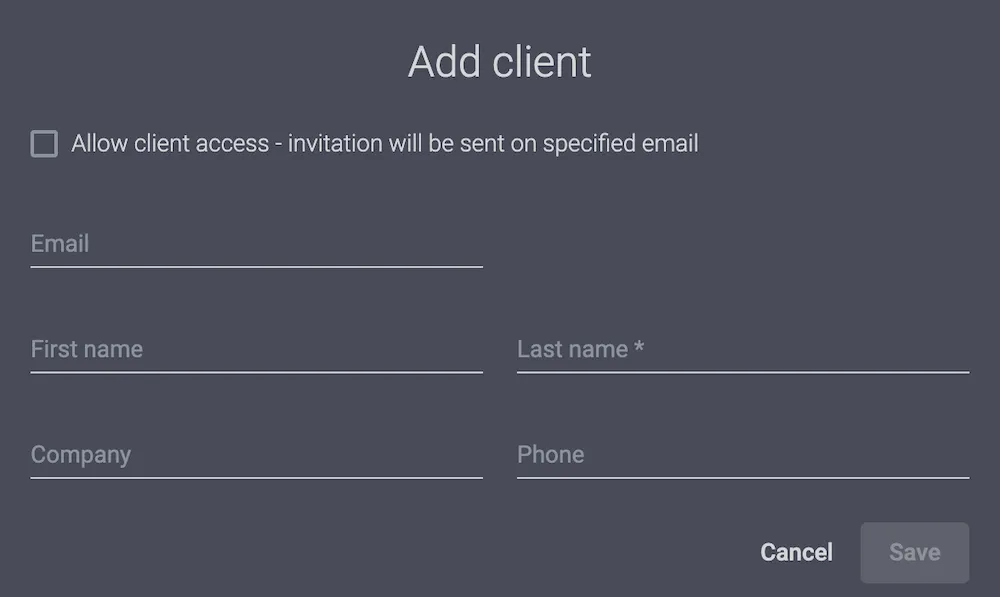
4. Klicken Sie unter dem Benutzerprofilsymbol auf + Client hinzufügen .
5. Füllen Sie die Felder für die Kundeninformationen (E-Mail, Name, Firma, Telefon) aus und aktivieren Sie das Kontrollkästchen Client-Zugriff zulassen. Überprüfen Sie die Informationen auf Richtigkeit und klicken Sie auf Speichern , um den Client zu CAPP hinzuzufügen.
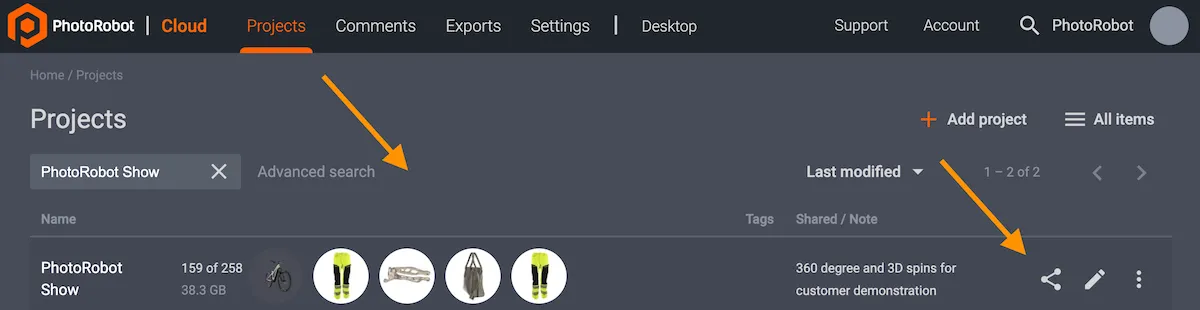
6. Öffnen Sie Projekte in der Cloud-Version von CAPP, suchen Sie das Projekt, das Sie mit dem gespeicherten Client teilen möchten, bewegen Sie den Mauszeiger über die Projektleiste und klicken Sie auf das Freigabesymbol rechts neben den Projektdetails.
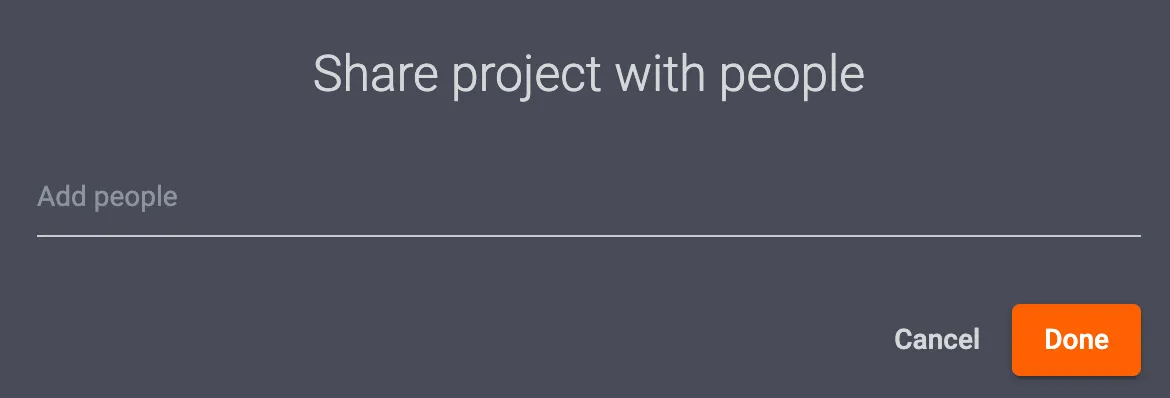
7. Klicken Sie auf das Freigabesymbol auf der rechten Seite der Projektleiste, um die Funktion Projekt für Personen freigeben zu öffnen, wählen Sie gespeicherte Clients aus und klicken Sie auf Fertig. Das Projekt wird nun mit dem Kunden geteilt, so dass er den Auftrag anzeigen und in CAPP kommentieren kann, um die Qualitätssicherung zu gewährleisten und bei Bedarf zusätzliche Anweisungen zu erhalten.
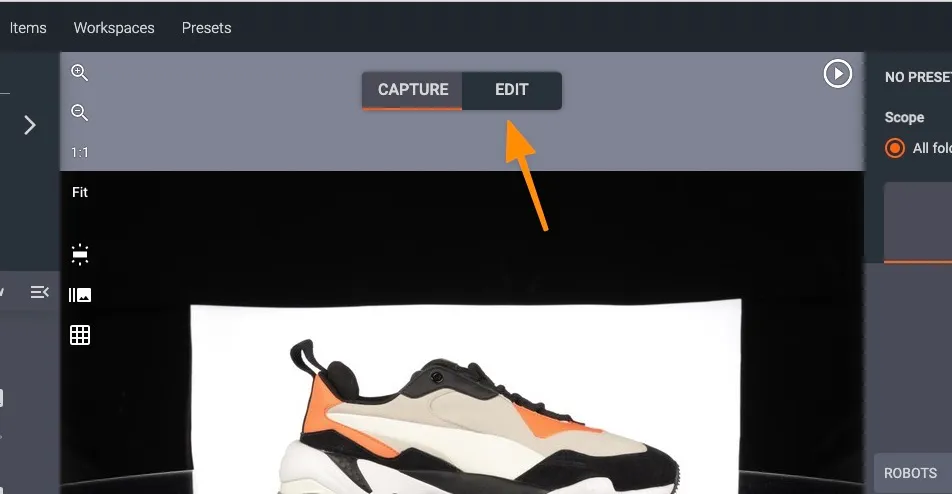
Capture-Modus-Schnittstelle
Nachdem Sie auf ein Element geklickt haben, werden Sie zu einer Erfassungs- / Bearbeitungsoberfläche weitergeleitet. Die ihnen zur Verfügung stehenden Steuerelemente ändern sich je nachdem, ob der Aufnahmemodus oder der Bearbeitungsmodus aktiv ist. Der Aufnahmemodus wird verwendet, um die Fotosequenz zu steuern, während der Bearbeitungsmodus die gesamte Nachbearbeitung innerhalb von CAPP steuert. Der aktive Modus wird oben auf dem Bildschirm hervorgehoben:
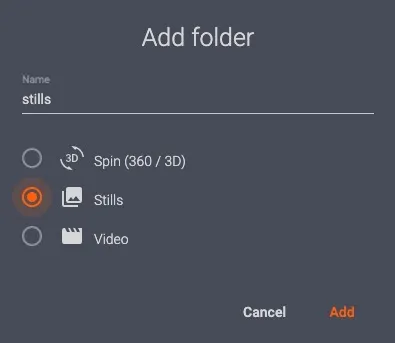
Hinzufügen eines Spins-, Standbild- oder Videoordners
Vor jedem Fotoshooting müssen Sie mindestens einen Ordner erstellen. Die Haupttypen von Ordnern sind Spin (für 360°-Präsentationen), Standbilder (für Standbilder) und Video (für Videos).
Erstellen eines Spins-Ordners
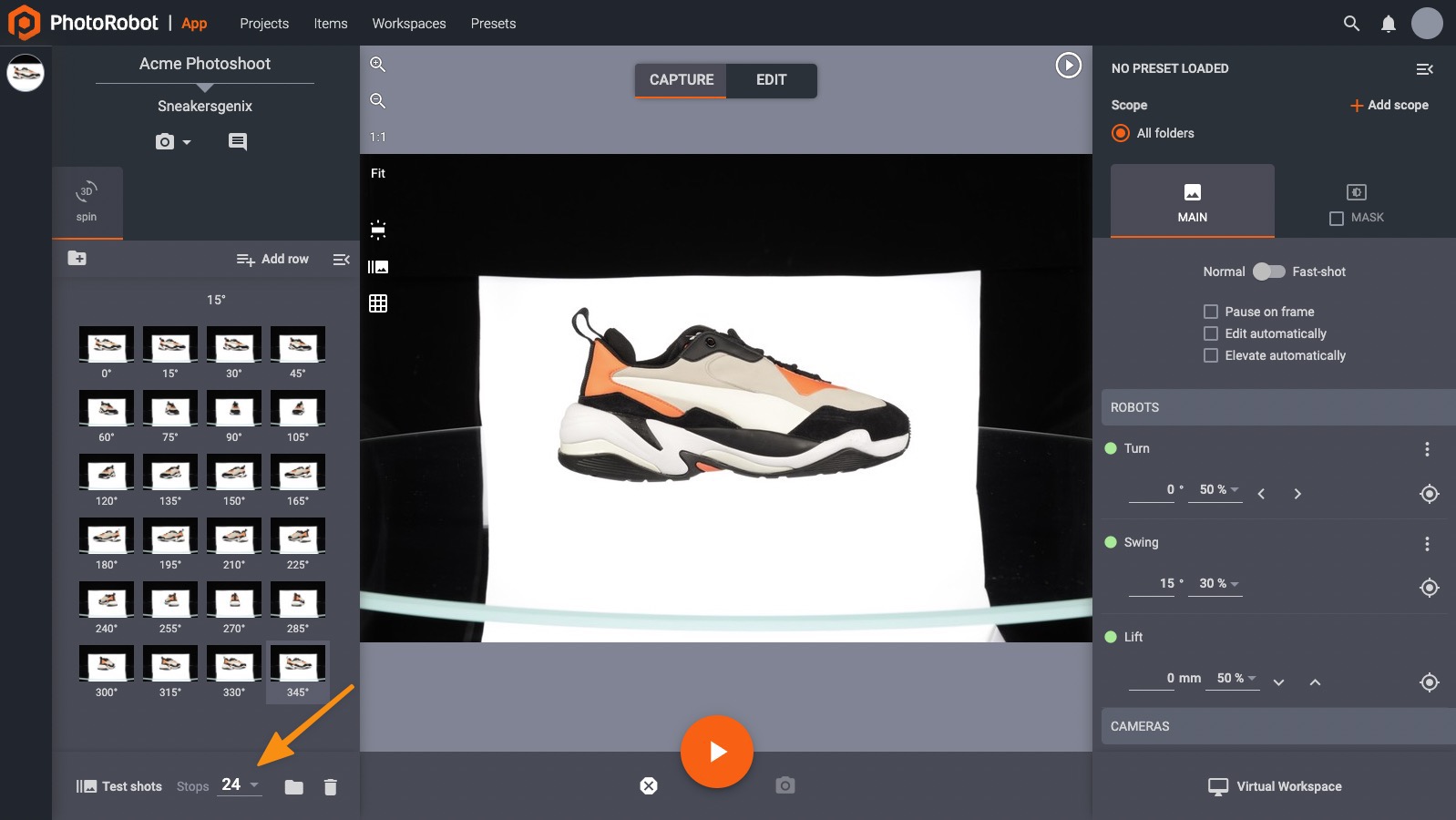
Beim Hinzufügen eines Spin-Ordners fügt CAPP automatisch Stopps (auch "Frames" genannt) hinzu, je nachdem, wie viele Bilder pro Spin Sie auswählen. Die Standardnummer ist 36, und dies kann in der unteren linken Ecke geändert werden. Mit einer höheren Anzahl von Stopps wird die Rotation reibungsloser sein, aber es wird auch mehr Speicherplatz beanspruchen.
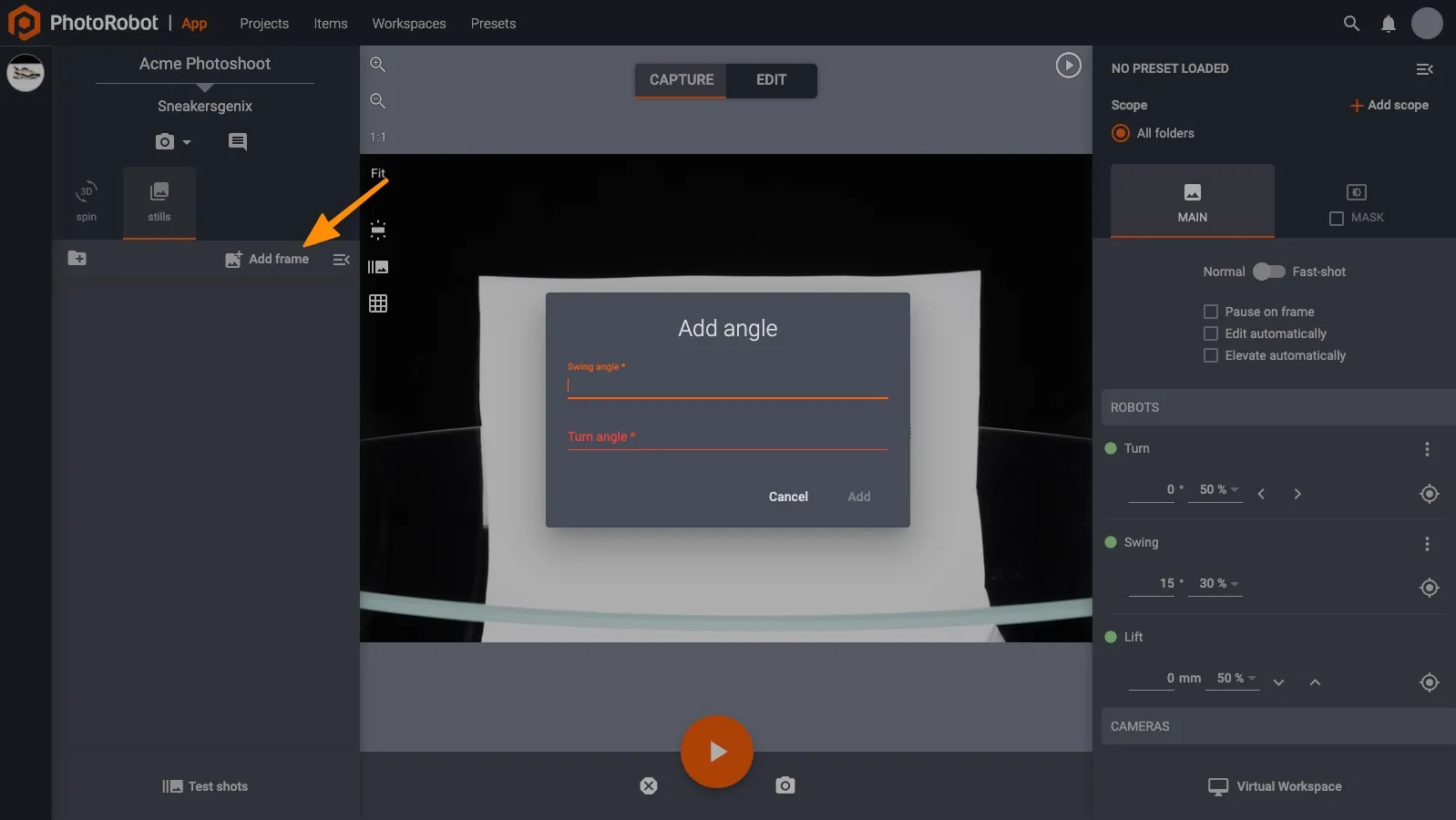
Erstellen eines Standbildordners
Wenn Sie einen Standbildordner auswählen, müssen Sie Ihre Stopps manuell hinzufügen. Dazu gehören ein Drehwinkel (der Drehwinkel) und ein Schwenkwinkel (die vertikale Position der Kamera entlang einer kreisförmigen Flugbahn). Der Schwenkwinkel ist wichtig, wenn Sie unseren Roboterarm oder ein anderes Modul verwenden, das die horizontale Position der Kamera ändern kann.
Bilder importieren
In einigen Fällen können Sie Bilder in einen neuen oder vorhandenen Ordner in CAPP importieren. Nehmen Sie zum Beispiel das Importieren von Handheld-Fotos, Detailaufnahmen oder anderen Bildern.
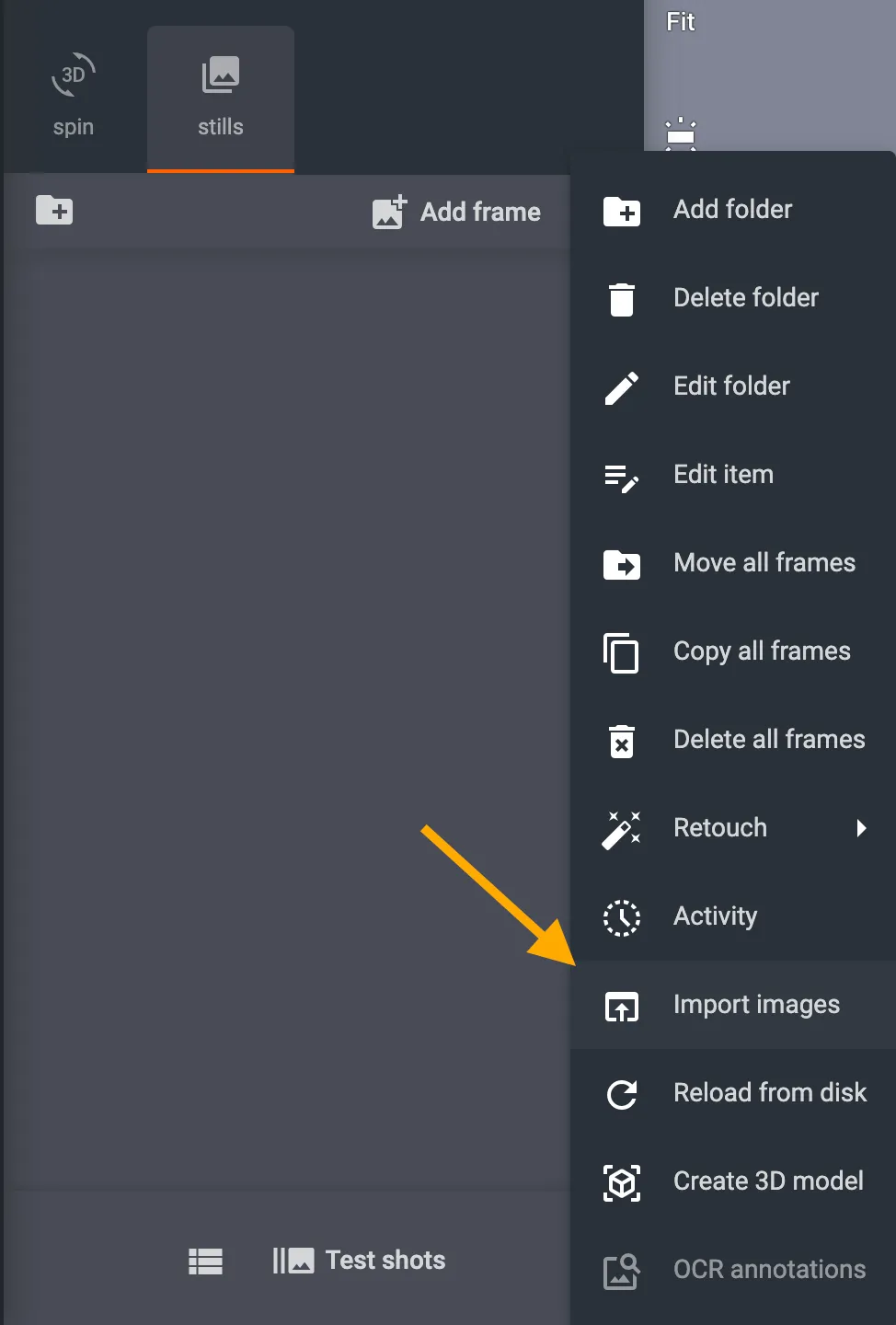
Um Bilder in CAPP zu importieren, öffnen Sie zunächst ein neues oder vorhandenes Element in der Benutzeroberfläche des Aufnahmemodus in CAPP. Klicken Sie anschließend auf das Symbol für das Menü "Ordnervorgänge" in der oberen rechten Ecke der Ordneroberfläche.
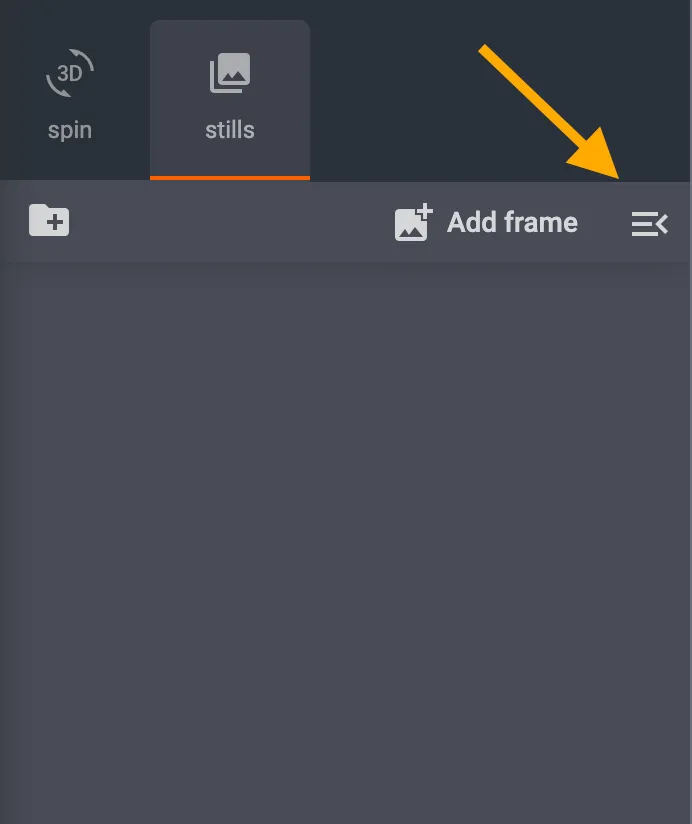
Suchen Sie dann in den Menüoptionen für Ordnervorgänge in der Liste nach Bildern importieren und klicken Sie darauf.
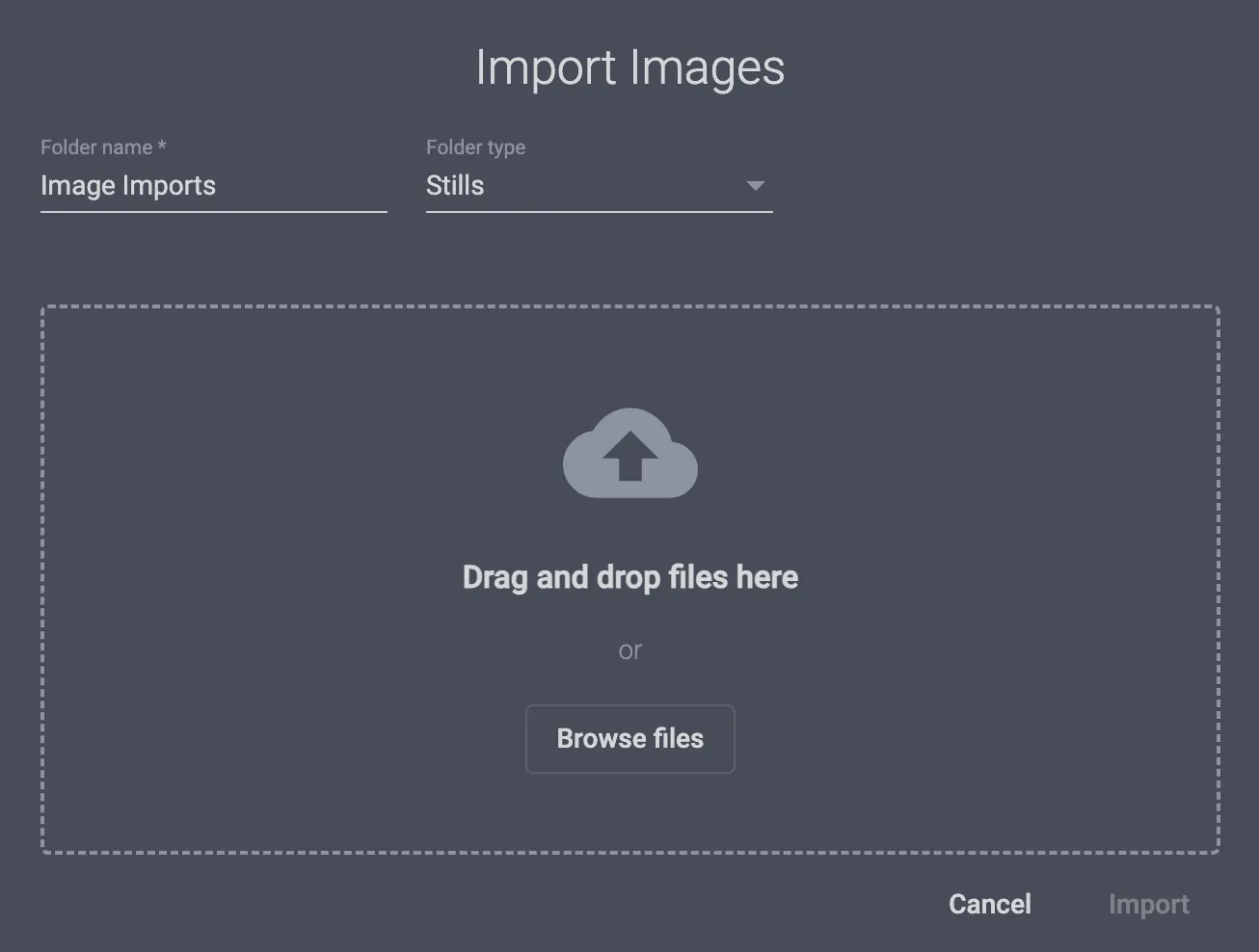
Wenn Sie auf Bilder importieren klicken, wird ein Popup-Fenster geöffnet, in dem Sie Bilder per Drag-and-Drop oder durch Durchsuchen lokaler Dateien importieren können. Oben im Fenster ist es auch möglich, den Ordnernamen und den Ordnertyp für die importierten Bilder zu konfigurieren.
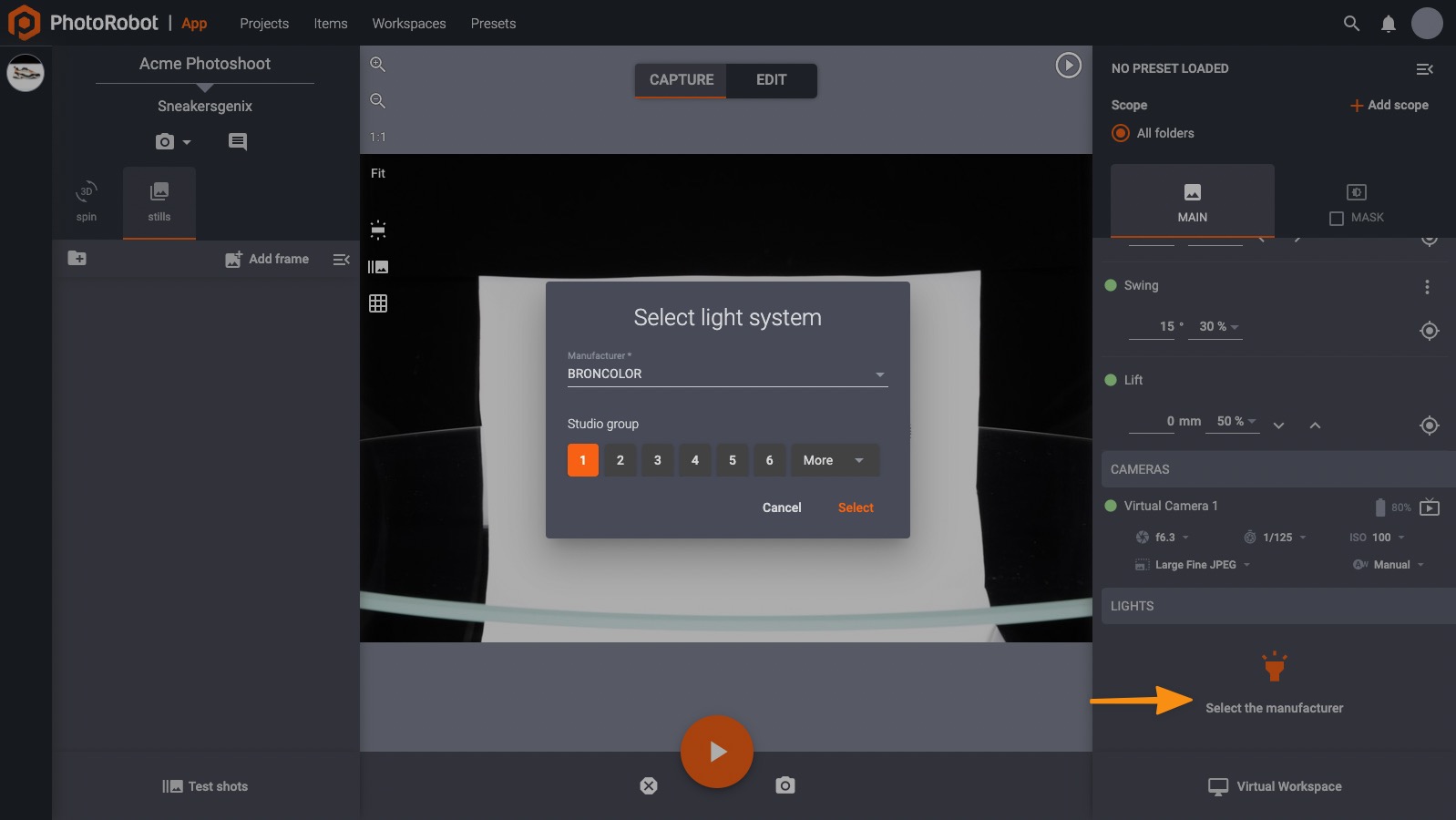
Kompatible Leuchten steuern
Wenn Sie mit CAPP kompatible Lichter verwenden, können Sie Lichter in der unteren rechten Ecke des Bearbeitungsmodusfensters auswählen.
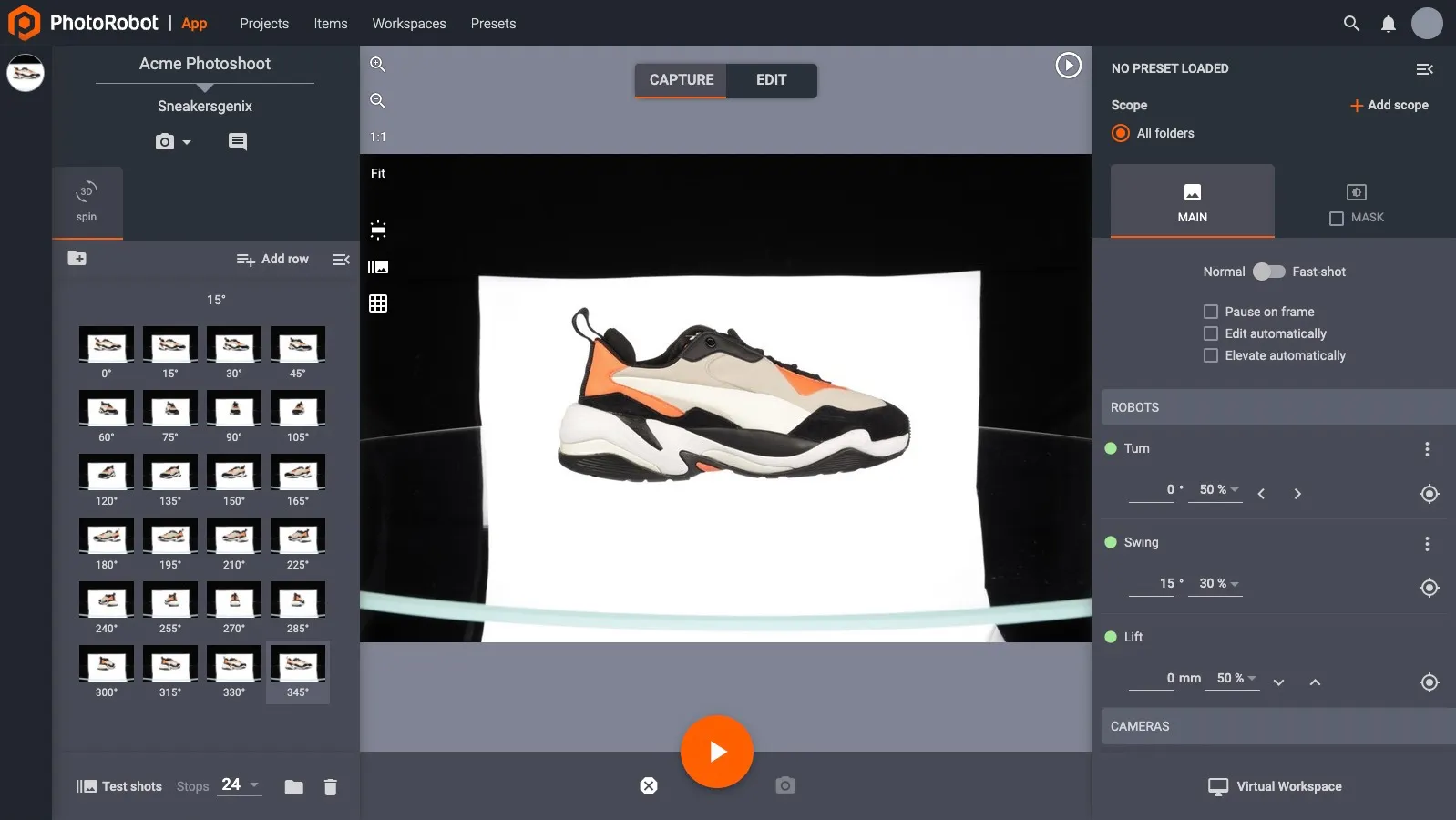
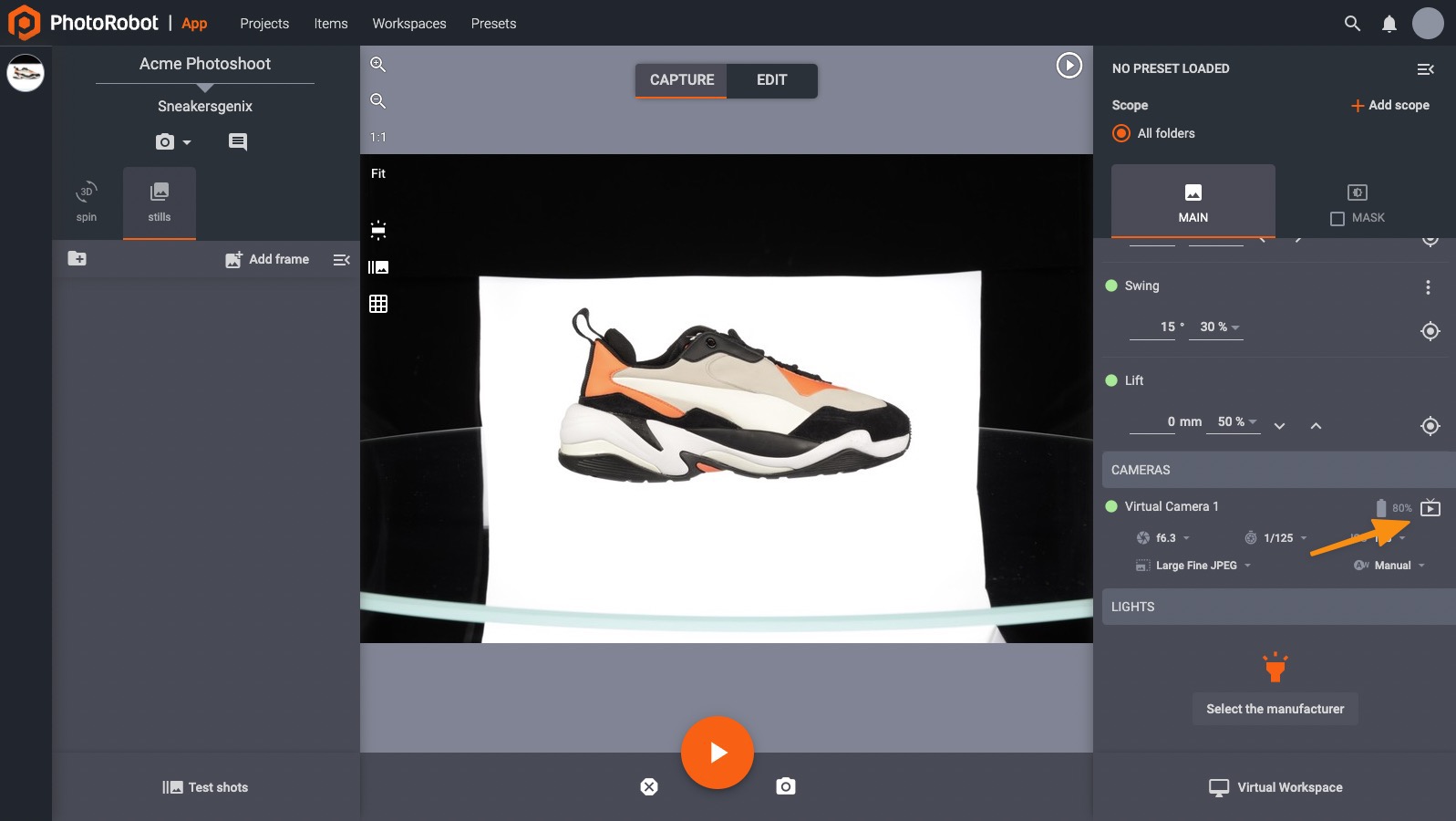
Übersicht über die Benutzeroberfläche im Aufnahmemodus
Der zentrale Teil der Benutzeroberfläche für den Aufnahmemodus umfasst das Vorschaufenster, in dem entweder das aktuell ausgewählte Bild (falls Sie bereits einige aufgenommen haben) oder die von der Kamera gestreamte Live-Ansicht angezeigt wird.
Live View, das nützlich ist, wenn Sie Gelassenheit und Fokus überprüfen möchten, kann im Kamerasteuerungsbereich im zentralen Teil der Steuerleiste auf der rechten Seite des Bildschirms umgeschaltet werden.
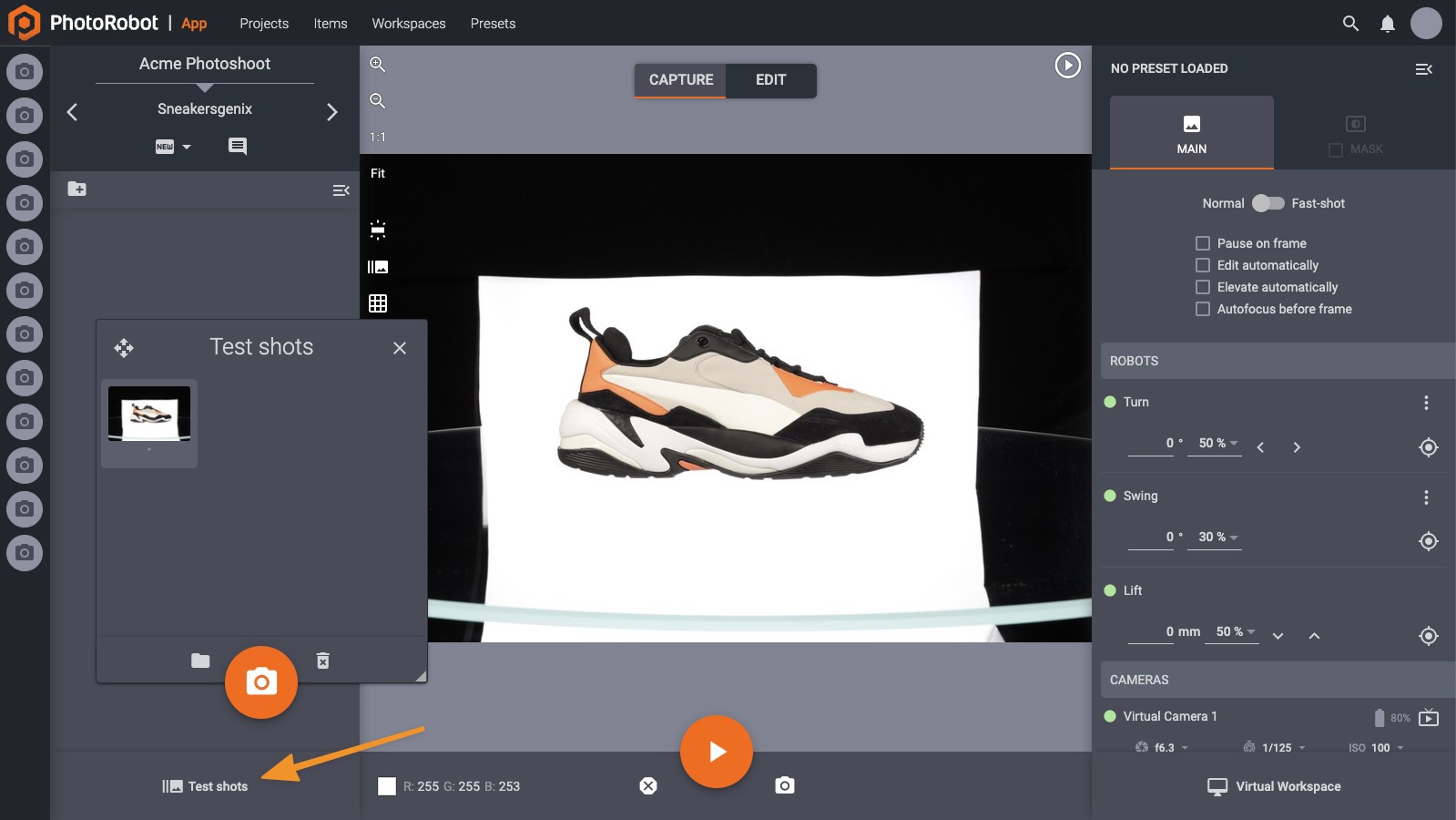
Testaufnahmen machen
Bevor Sie endgültige Bilder aufnehmen, ist es eine gute Idee, eine oder mehrere Testaufnahmen zu machen. Der einfachste Weg, dies zu tun, ist durch Drücken der T-Taste auf Ihrer Computertastatur. Auf diese Weise können Sie überprüfen, ob Sie die Einstellungen Ihrer Beleuchtung, Kamera usw. ändern sollten. Testbilder werden im Ordner "Testaufnahme" gespeichert, auf den Sie im unteren linken Teil des Bildschirms zugreifen können.
Starten einer Fotosequenz
Wenn Sie mit den Einstellungen zufrieden sind, die durch eine Testaufnahme überprüft wurden, ist es an der Zeit, die Fotosequenz auszuführen. Dies kann durch Drücken der Leertaste auf Ihrer Tastatur oder durch Klicken auf die Schaltfläche "Start" im Bild unten ausgelöst werden.
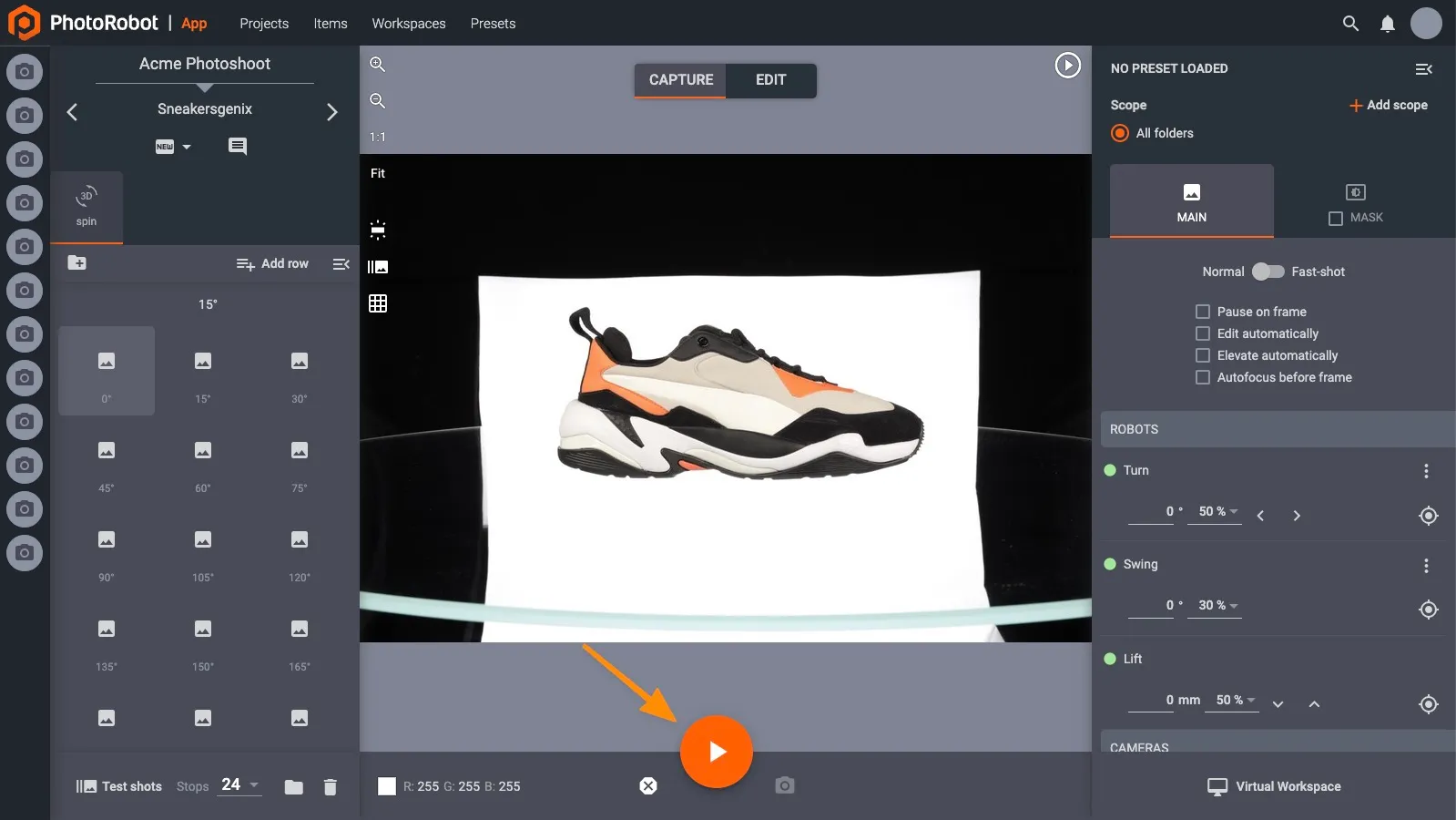
Wenn Sie über einen Barcode-Scanner verfügen, können Sie die Sequenz auch durch Scannen eines speziellen "Start"-Barcodes auslösen. Laden Sie den PhotoRobot-Start-Barcode online herunter und drucken Sie ihn aus, um diese Funktion zu nutzen.

Sie werden wissen, dass die Sequenz erfolgreich abgeschlossen wurde, wenn alle Miniaturansichten auf der linken Seite mit Bildern gefüllt wurden. Es ist eine gute Praxis, auf mögliche Fehlzündungen der Stroboskoplichter zu achten.
Wenn eine der Miniaturansichten im Vergleich zu den anderen dunkler ist, verringern Sie die Drehzahl oder überprüfen Sie gegebenenfalls den Zustand Ihrer Lichter. Sie können diese Bilder dann markieren und erneut aufnehmen, ohne die gesamte Sequenz erneut ausführen zu müssen.
Sobald die Aufnahmesequenz abgeschlossen ist, können Sie in den Bearbeitungsmodus wechseln, in dem Sie die Nachbearbeitung durchführen.
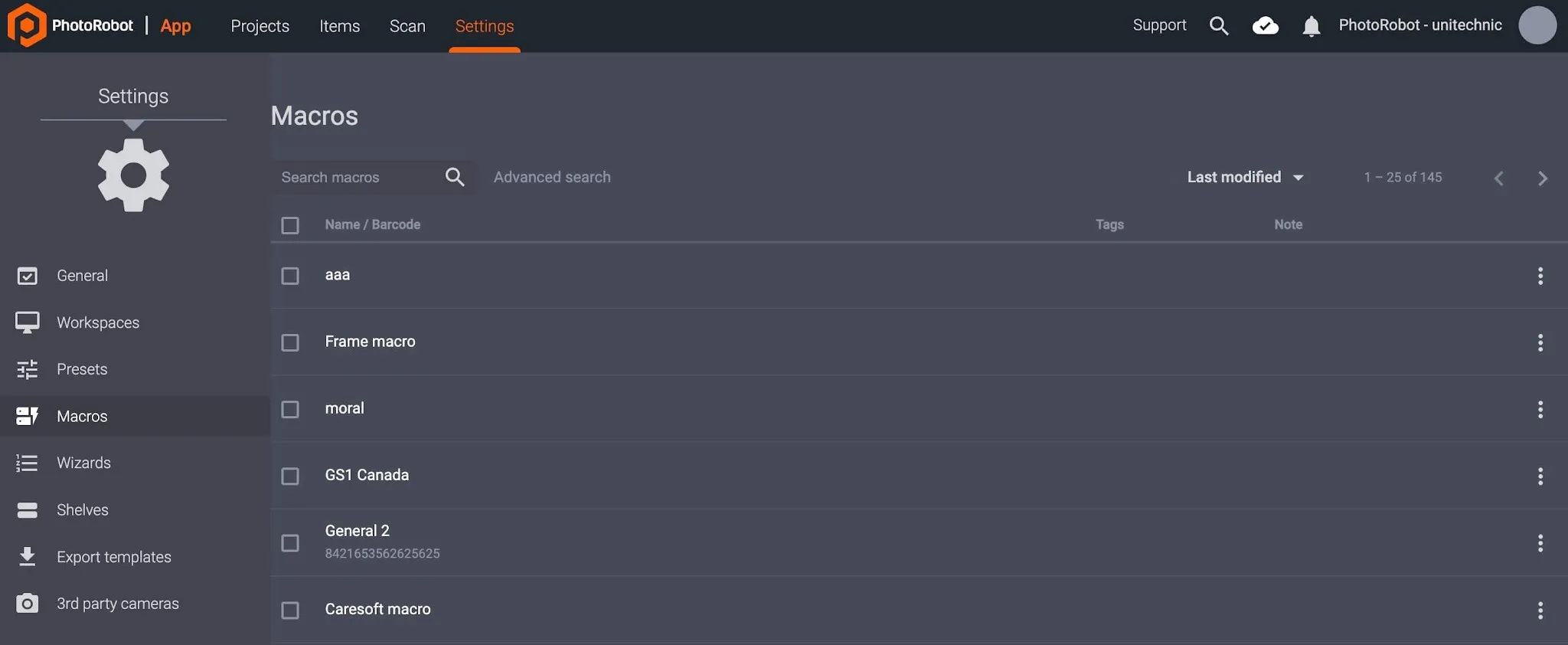
PhotoRobot-Makros
Makros in CAPP ermöglichen es Benutzern, Befehle für den Erfassungsprozess eines Elements und seiner Ordner (Drehen, Standbilder usw.) zu definieren. Befehle können auf einzelne oder mehrere Ordner angewendet werden, Sequenzen ausführen, Bildbearbeitungen, Arbeitsbereiche, Vorgaben, Bildeinstellungen kopieren und Bildeinstellungen verschieben. Benutzer können Makros auch nach Name, Barcode, Tag oder Notizen weiter anpassen.
Hinweis: Für detaillierte Anweisungen zur Konfiguration und Nutzung von PhotoRobot Macros siehe den PhotoRobot Macros Benutzerhandbuch. Erfahren Sie, wie Makros die Fotografie-Automatisierungsmagie über mehrere Ordner und Komponenten hinweg ermöglichen, mit der automatischen Verarbeitung komplexer Aufgaben.
PhotoRobot Wizards Modus
Der Wizards-Modus in CAPP dient als Alternative zur manuellen Hardware-, Kamera- und Sequenzkonfiguration. Im Gebrauch ermöglicht der Wizards-Modus einem Administrator oder Fotografen, verschiedene Wizards zu erstellen, um den Aufnahmemodus für Produktionslinienbetreiber zu vereinfachen. Ein Bediener kann dann CAPP im Wizards-Modus starten, der als äußerst einfache Schnittstelle mit guidierten Schritten fungiert. Es gibt auch begrenzte Kontrollen für die Benutzerfreundlichkeit und das Onboarding.
Nach der Erstellung eines Assistenten speichert er Presets und Workspace-Konfigurationen sowie vordefinierte Schritte, die Operatoren befolgen müssen. Die Bediener können keine Einstellungen anpassen und müssen die Anweisungen in jedem Schritt ausführen, bevor sie zum nächsten Prozess übergehen können.
Hinweis: Wizard-Schritte werden in einem JavaScript-ähnlichen Sprachformat definiert und von PhotoRobot-Beratern für individuelle Funktionalität geskriptet. Benutzer können auch grundlegende Funktionen für erste Experimente oder einfache Setups skripten. Für Dokumentationen zur technischen Konfiguration und zur Nutzung von Assistenten siehe das PhotoRobot Wizard Mode User Manual.
Benutzeroberfläche für den Bearbeitungsmodus
Auf der rechten Seite des Bildschirms können Sie beliebig viele Bearbeitungsvorgänge hinzufügen:
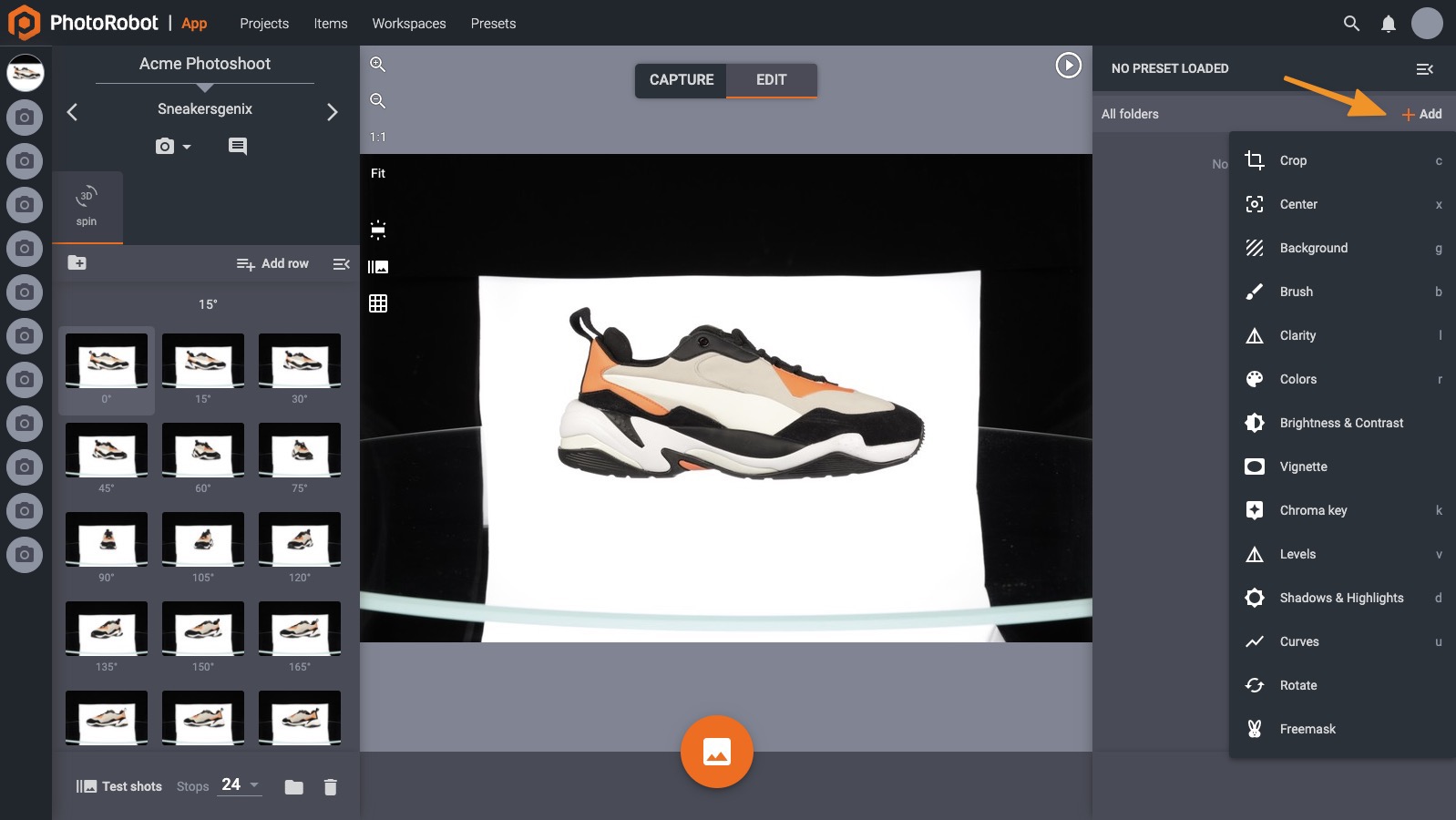
Einige der häufigsten Bearbeitungsvorgänge sind oben aufgeführt: Zuschneiden, Zentrieren und Hintergrund.
Automatisches Zuschneiden
Zuschneiden - Beim Zuschneiden von Bildern gibt es drei Hauptsteuerelemente: die Schalter für automatisches Zuschneiden, Seitenverhältnis und Abstand (die steuern, wie viel Platz um das fotografierte Objekt herum vorhanden ist).

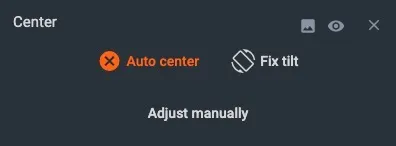
Auto-Center
Mitte - Obwohl die meisten PhotoRobot Maschinen mit Lasern ausgestattet sind, die bei der Positionierung von Objekten auf der Oberfläche helfen, benötigen die meisten Bilder eine zusätzliche Softwarezentrierung. Dies ist besonders wichtig für 360° Spins. Wenn Sie beginnen, wird empfohlen, die Funktion "Auto Center" eingeschaltet zu lassen, wie in der Folgenden Abbildung zu sehen ist:
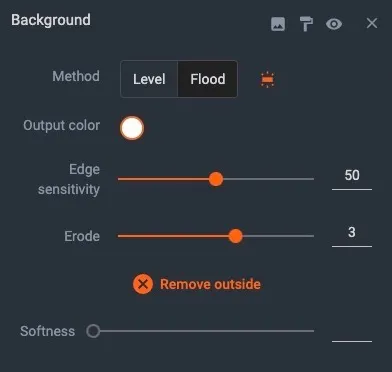
Entfernen des Hintergrunds
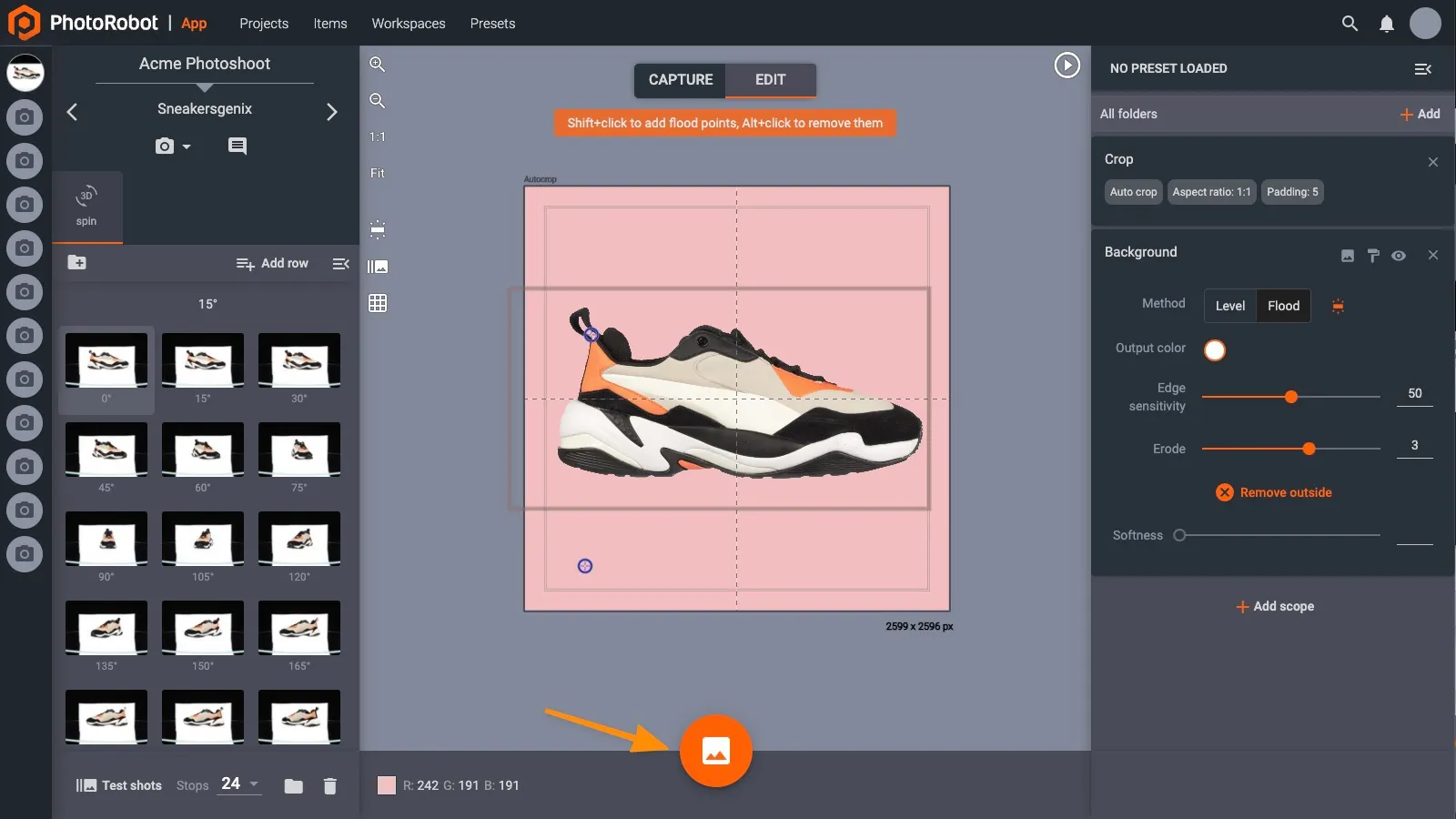
Mit dem Vorgang Hintergrund wird der Hintergrund eines Bildes oder einer Bildserie angepasst und der Hintergrund bei Bedarf vollständig entfernt. Unterschiedliche Ergebnisse können durch die drei verschiedenen Methoden zur Hintergrundentfernung in CAPP erzielt werden. Es gibt die Entfernung des Hintergrunds nach Ebene, die Entfernung des Hintergrunds nach Flood und durch Freemasking.
- Bei der Hintergrundentfernung nach Stufe wird eine Softwareanalyse von RGB-Farbstufen und Helligkeitswerten verwendet, um den Hintergrund und den Vordergrund zu identifizieren. Dies ist vorteilhaft beim Fotografieren von hellen oder weißen Objekten und bei der Verwendung eines weißen Hintergrunds. Passen Sie die Pegel in der Software an, um die Hintergrundhelligkeit zu erhöhen, bis sie rein weiß wird. Es ist dann möglich, den Hintergrund transparent zu machen oder verschiedene Farbhintergründe einzutauschen.
- Die Hintergrundentfernung durch Fluten funktioniert nach ähnlichen Prinzipien wie die Hintergrundentfernung auf Ebenen und ist am häufigsten beim Fotografieren dunklerer Objekte nützlich. Wenn Sie den Hintergrund durch den Flutvorgang entfernen, wird die Hintergrundhelligkeit intensiver, bis sie um das Element herum rein weiß wird. Anstatt jedoch die Tonwerte anzupassen, verwendet das Werkzeug einen ausgewählten Punkt, um den Hintergrund zu identifizieren, und "überflutet" dann diesen Bereich. Der Benutzer klickt einfach auf einen Punkt außerhalb des fotografierten Objekts. Die Software erkennt dann die Kanten des Objekts und wendet eine Flutung an, um den verfügbaren Raum um das Objekt herum zu füllen.
- Die Entfernung des Freemasking-Hintergrunds erfordert mehr Konfiguration als die Verwendung von Ebenen oder Flood, aber es kann eine der präzisesten und schnellsten Methoden sein. Bei dieser Methode werden ein ausgeschnittenes Maskenbild und ein Hauptbild des Produkts verwendet, wobei die beiden Bilder zusammengesetzt werden, um den Hintergrund zu entfernen. Manchmal ist dies die einzige effiziente Methode, um den Hintergrund um "schwierigere" Objekte herum zu entfernen. Nehmen Sie zum Beispiel reflektierende Gegenstände oder Objekte, die Bereiche mit leerem Raum enthalten. Die freie Maskierung identifiziert das Objekt im Vergleich zu allen leeren Bereichen, während bei Bedarf der Hintergrund um das Element herum und darin entfernt wird. Die Methode erfordert jedoch eine zusätzliche Konfiguration der Studiolichter, um die Haupt- und Maskenbilder für die Hintergrundentfernung zu erstellen.
Anmerkung: Denken Sie daran, dass es hauptsächlich davon abhängt, wie die Szene beleuchtet ist, ob CAPP den Hintergrund entfernen kann oder nicht. Wenn Sie keine Einstellungen finden, die zu Ihrer Zufriedenheit passen, nehmen Sie die Bilder mit anderen Lichteinstellungen erneut auf.
Wenn Sie mit Ihren Bearbeitungseinstellungen zufrieden sind, wenden Sie die Parameter an, indem Sie auf die Schaltfläche "Übernehmen" klicken, die sich an der Stelle befindet, an der zuvor die Schaltfläche "Start" angezeigt wurde.
Veröffentlichen von Bildern
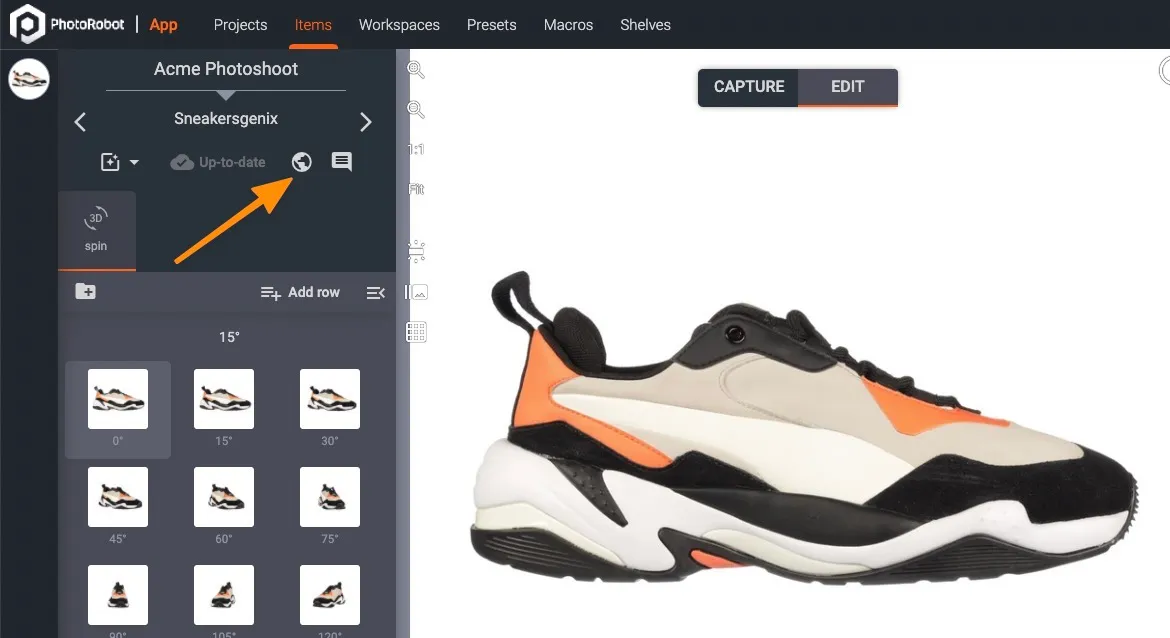
Sobald der Fortschrittsbalken sein Ende erreicht hat, wurden Ihre Änderungen erfolgreich auf Ihre Bilder angewendet. Wenn Sie CAPP ohne PhotoRobot Cloud-Dienste verwenden, werden die resultierenden Bilder in einer Ordnerstruktur auf Ihrem lokalen Laufwerk gespeichert.
Wenn Sie PhotoRobot Cloud-Hosting verwenden, können Dateien auch im PhotoRobot Cloud-Speicher gefunden werden. Um auf diese zuzugreifen, klicken Sie im Abschnitt Fotos oben links auf dem Bildschirm auf In der Cloud öffnen.
Exportieren von Bildern
Um ein Element aus CAPP zu exportieren, können Benutzer es auf eine lokale Festplatte oder in die PhotoRobot Cloud exportieren. Der Elementexport ermöglicht es, Elemente mit benutzerdefinierten Namenskonventionen zu definieren, Bildformat, Auflösung und verschiedene Dateinamenvorlagenvariablen anzugeben.
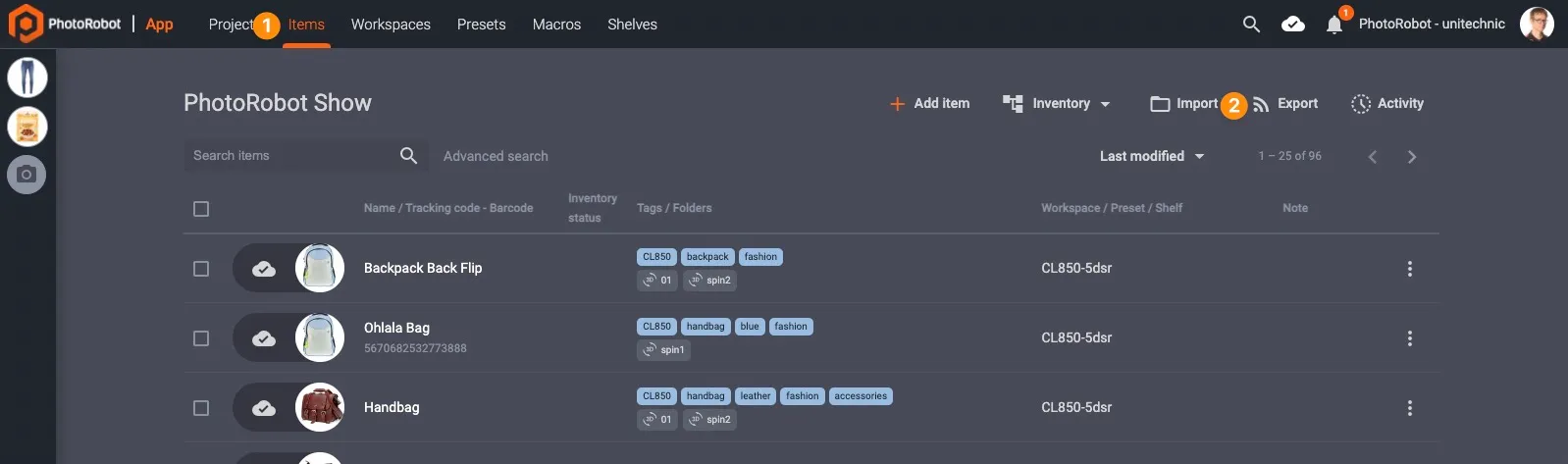
Um auf die Einstellungen für den Artikelexport zuzugreifen, gehen Sie zum Abschnitt Elemente und klicken Sie im Menü über der Elementliste auf Exportieren :
Das folgende Fenster wird geöffnet, in dem Sie die Exporteinstellungen ändern können:
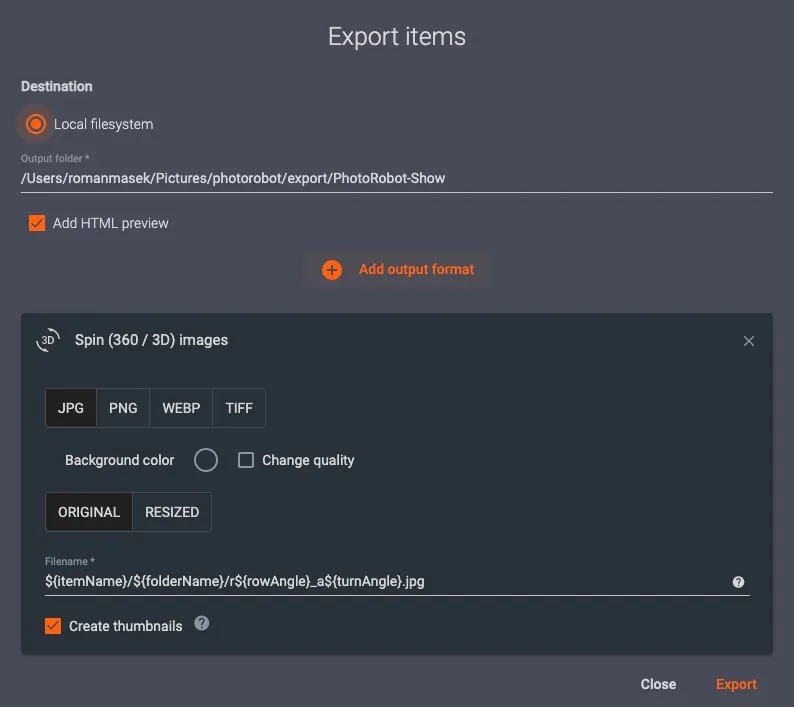
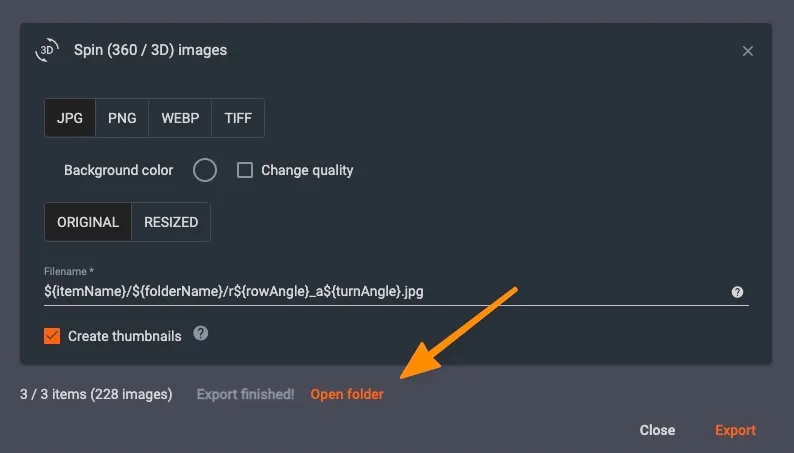
Führen Sie den Exportvorgang aus, indem Sie auf die Schaltfläche Exportieren in der unteren rechten Ecke dieses Fensters klicken.
Wenn der Exportfortschrittsbalken sein Ende erreicht hat, können Sie auf Ordner öffnen klicken, um auf die exportierten Bilder zuzugreifen.
Über Cloud veröffentlichen
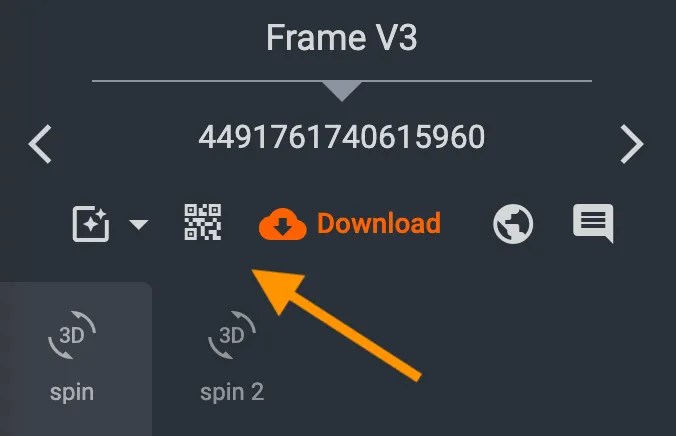
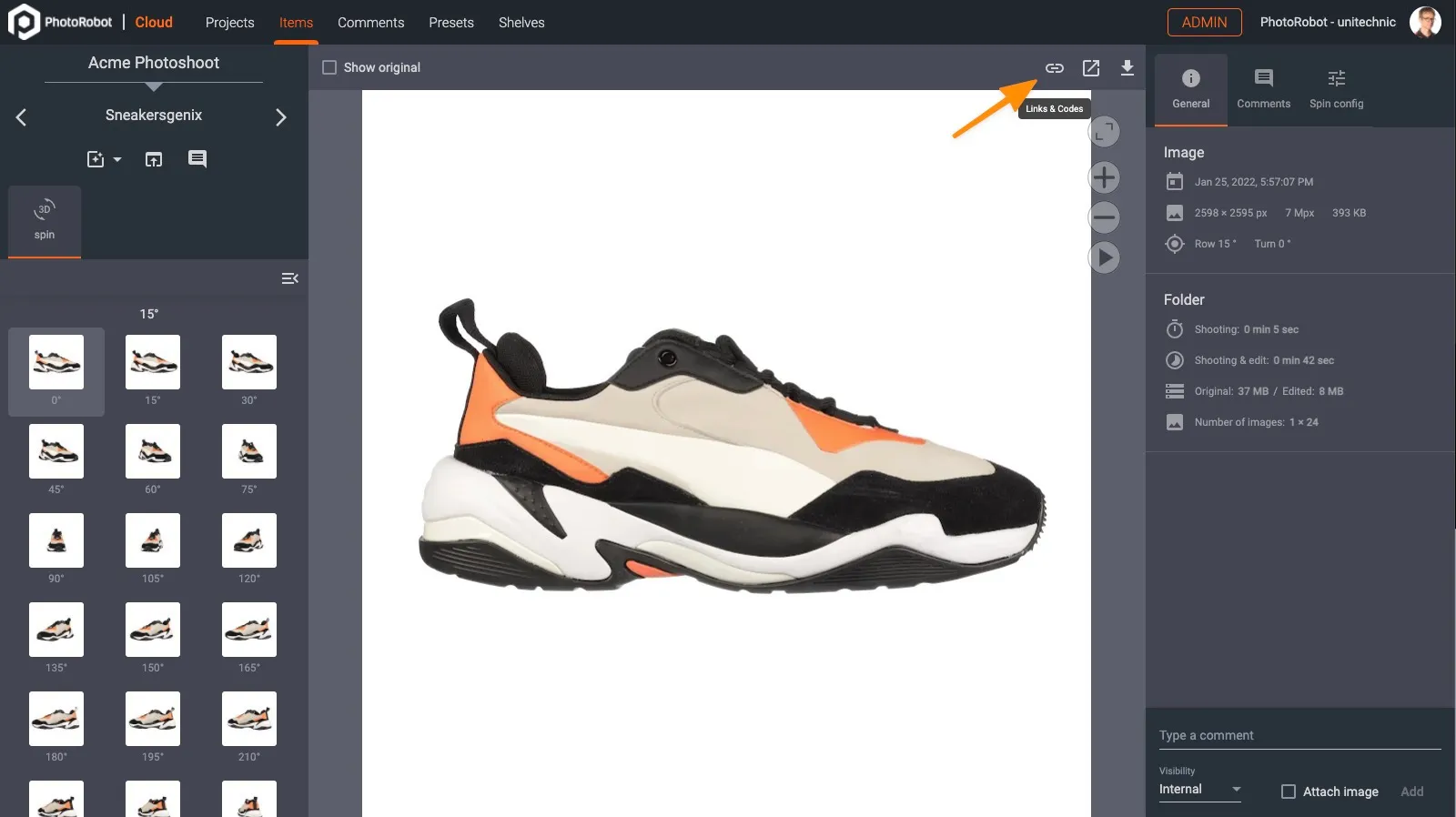
Wenn Sie über PhotoRobot Cloud-Dienste veröffentlichen, öffnen Sie das Element zunächst in der Cloud. Die Benutzeroberfläche zeigt das aufgenommene Bild an. Klicken Sie auf die Schaltfläche Codes & Links:
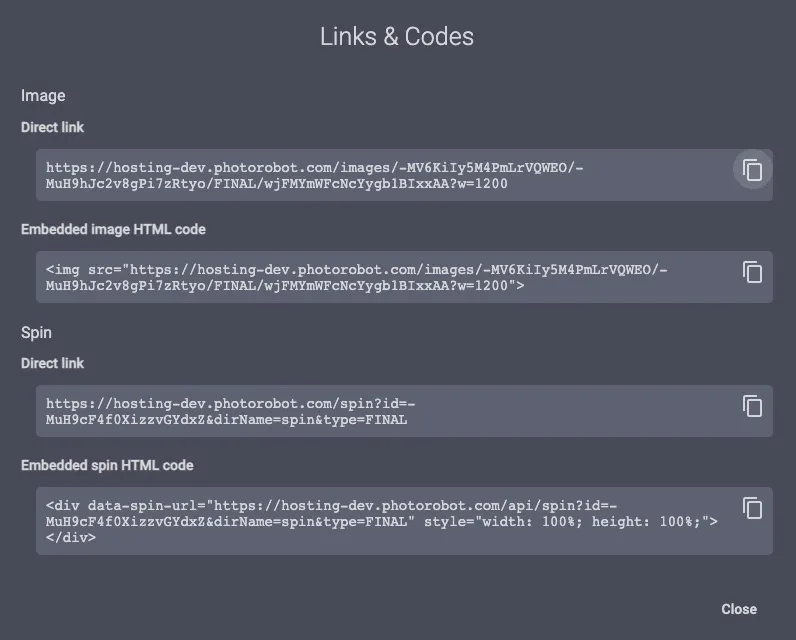
Kopieren Sie den Direct-Link und fügen Sie ihn in Ihren Browser ein, um das Bild oder den Spin anzuzeigen. Fügen Sie diesen Code auf Ihrer Seite ein, um den Spin für die Anzeige einzubetten.


EOS Rebel Serie


EOS DSLR-Serie


EOS M spiegellose Serie


PowerShot-Serie


Nahaufnahme / Handheld

Die Canon EOS Rebel Serie bietet einsteigerfreundliche DSLR-Kameras mit solider Bildqualität, intuitiver Bedienung und vielseitigen Funktionen. Diese Kameras sind ideal für Fotografie-Enthusiasten und bieten zuverlässigen Autofokus, dreh- und schwenkbare Touchscreens sowie Full HD- oder 4K-Videoaufnahmen.
Verbindung
Auflösung (MP)
Auflösung
Die Canon EOS DSLR-Serie bietet hochwertige Bilder, einen schnellen Autofokus und Vielseitigkeit und ist damit ideal für die Fotografie und Videoproduktion.
Verbindung
Auflösung (MP)
Auflösung
Die spiegellose Canon EOS M Serie kombiniert kompaktes Design mit DSLR-ähnlicher Leistung. Mit austauschbaren Objektiven, schnellem Autofokus und hochwertigen Bildsensoren eignen sich diese Kameras hervorragend für Reisende und Content-Ersteller, die Mobilität suchen, ohne die Bildqualität zu beeinträchtigen.
Verbindung
Auflösung (MP)
Auflösung
Die Canon PowerShot-Serie bietet kompakte, benutzerfreundliche Kameras für Gelegenheitsfotografen und Enthusiasten. Mit Modellen, die von einfachen Point-and-Shoot-Kameras bis hin zu fortschrittlichen Zoomkameras reichen, bieten sie Komfort, solide Bildqualität und Funktionen wie Bildstabilisierung und 4K-Video.
Verbindung
Auflösung (MP)
Auflösung
Die Canon Nah- und Handkameras sind für detaillierte Nahaufnahmen und Videos konzipiert. Sie sind kompakt und einfach zu bedienen und bieten präzisen Fokus, hochauflösende Bildgebung und vielseitige Makrofunktionen – perfekt für Vlogging, Produktfotografie und kreative Nahaufnahmen.
Verbindung
Auflösung (MP)
Auflösung


