Einrichten eines PhotoRobot-Arbeitsbereichs
Das folgende Benutzerhandbuch beschreibt die Schritte zur Einrichtung eines Arbeitsbereichs in der PhotoRobot Controls App (im Folgenden einfach "CAPP"). Ein Arbeitsbereich ist eine Liste von Hardware, die für ein bestimmtes Fotoshooting verwendet wird. Es kann verschiedene PhotoRobot-Module, Kameras, Lichter und weiteres Zubehör enthalten.
Hinweis: Falls Sie CAPP noch nicht installiert und mit ihr vertraut gemacht haben, siehe PhotoRobot Getting Started für einen Überblick über die Software, ihre Konfiguration und deren Nutzung. Die Informationen in diesem Benutzerhandbuch sollen Kunden unterstützen, die bereits ein allgemeines Verständnis der Software erworben haben.
Beachten Sie außerdem, dass es möglich ist, mit einem vordefinierten Sample Workspace zu arbeiten, der so konfiguriert ist, dass er virtuelle Hardware verwendet. Ein Beispielarbeitsbereich ermöglicht es den Nutzern, mit verschiedenen Funktionen in CAPP zu experimentieren, indem sie virtuelle Roboter und Kameras auswählen.
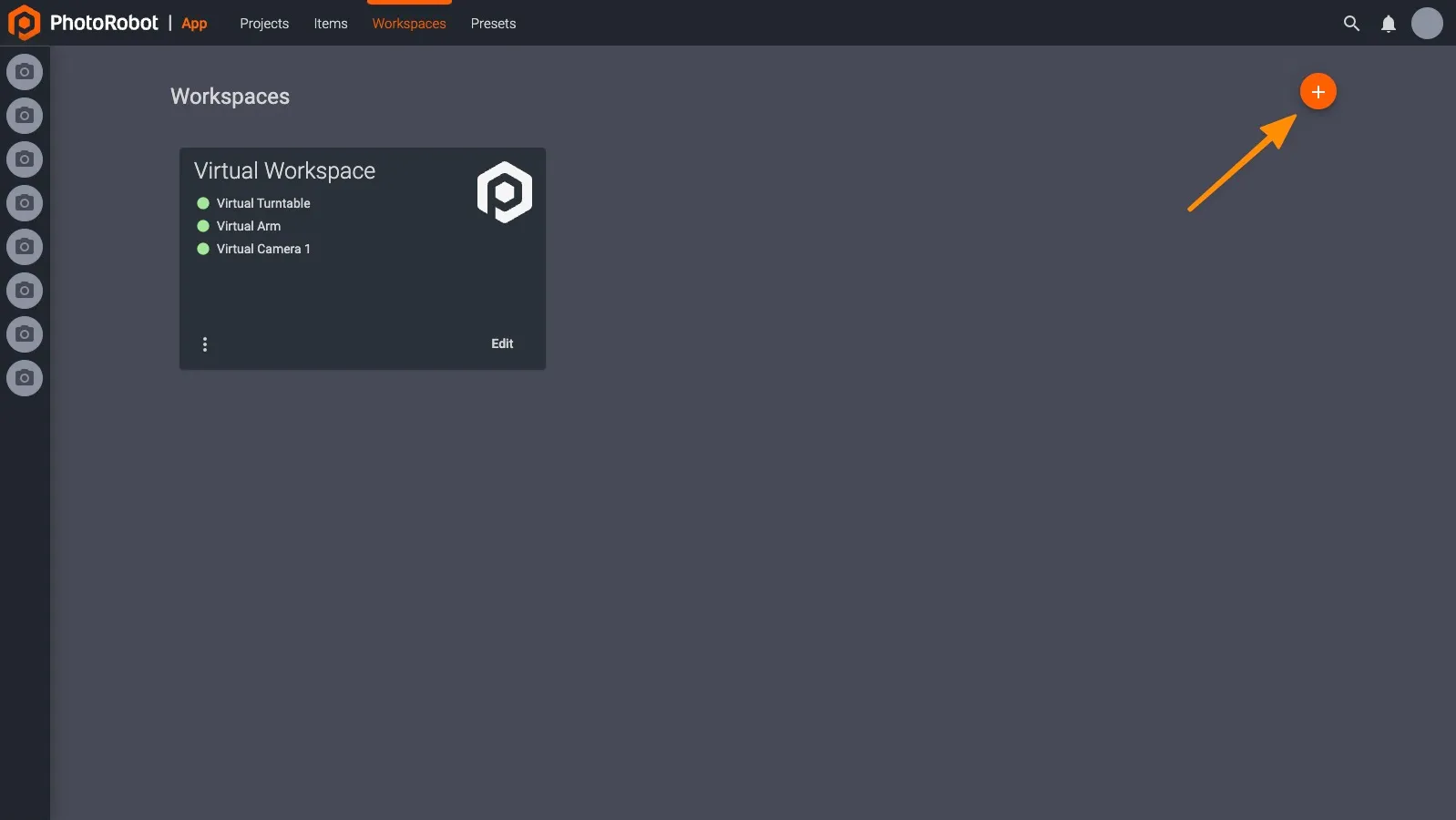
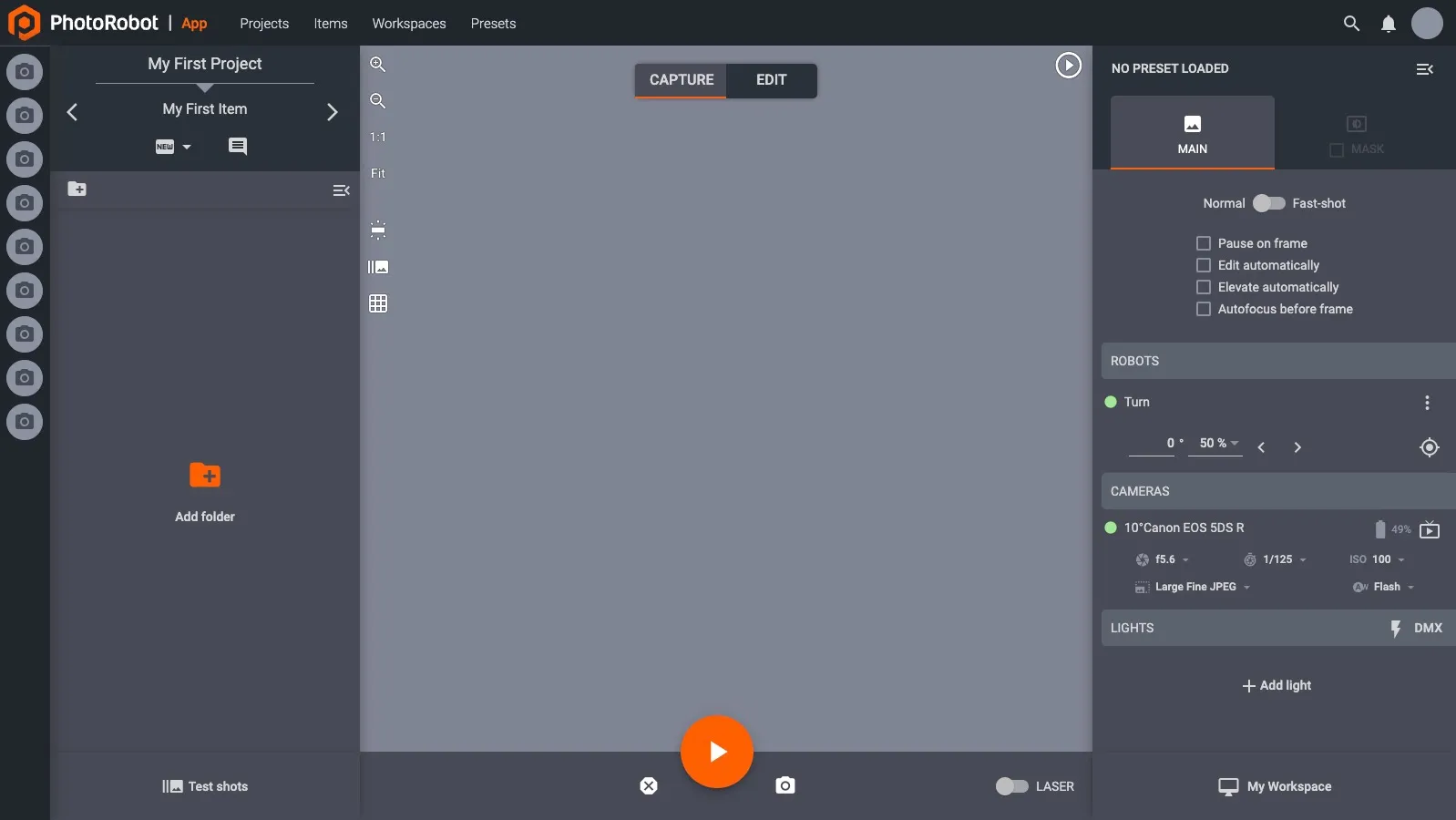
Um einen Arbeitsbereich zu erstellen, gehe in CAPP zu Arbeitsbereichen und tippe dann auf die Schaltfläche "Erstellen" (+).
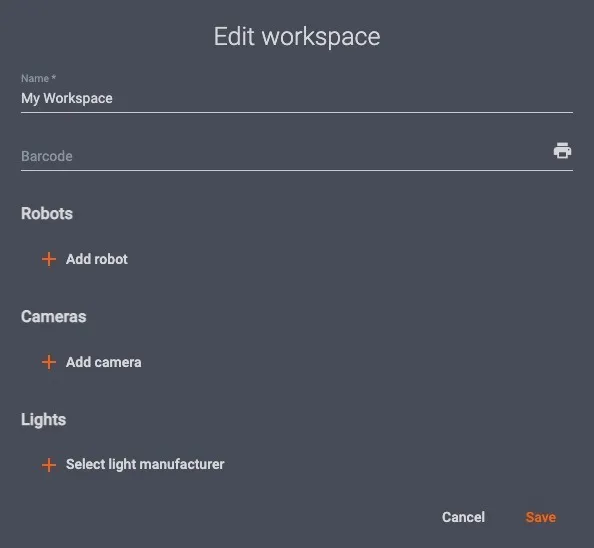
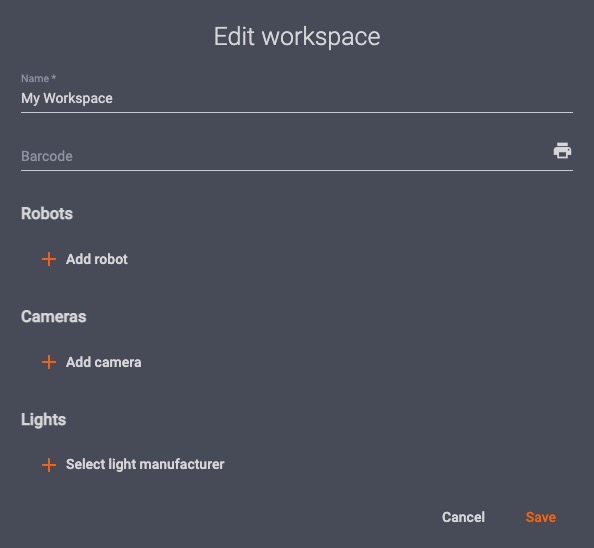
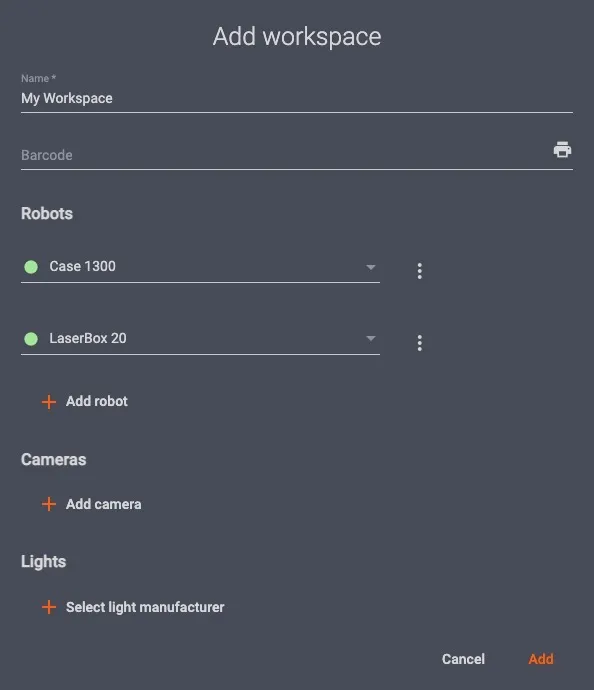
Mit dem Erzählen-Button öffnet sich das Menü "Arbeitsbereich bearbeiten", in dem man Roboter hinzufügen, Kamera hinzufügen und Lichthersteller auswählen können.
Beachten Sie, dass Sie nach dem Anschluss einer Hardware (oder Kamera) an einen Arbeitsbereich sofort sehen können, ob sie online ist (von CAPP erkannt). Dazu überprüfen Sie die Farbe des Punkts links neben dem Namen des jeweiligen Geräts. Wenn das Gerät erkannt wird, erscheint ein grüner Punkt.

Alternativ signalisiert ein grauer Punkt , dass die Hardware nicht erkannt wurde oder nicht eingeschaltet ist. Wenn ein roter Punkt vorhanden ist, gibt es einen Fehler, zum Beispiel dass der Benutzer die Kamera nicht in den manuellen Modus schaltet. Um die Ursache des Fehlers zu identifizieren, fahren Sie mit der Maus über den roten Punkt, um ein Tooltip mit einer Beschreibung des auftretenden Fehlers anzuzeigen.
Für häufige Probleme und deren Lösungen siehe bitte das Troubleshooting PhotoRobot Handbuch.
Roboter hinzufügen
Stellen Sie im nächsten Schritt sicher, dass alle Roboter für das Fotoshooting eingeschaltet und mit demselben lokalen Netzwerk wie Ihr Computer verbunden sind. Drücken Sie dann Robot hinzufügen.
- Klicken Sie auf Roboter hinzufügen , um eine Liste der verfügbaren Roboter anzuzeigen.
- Wählen Sie die Roboter, die Sie verwenden möchten, aus der Liste aus.
Konfigurieren von Fast-Shot
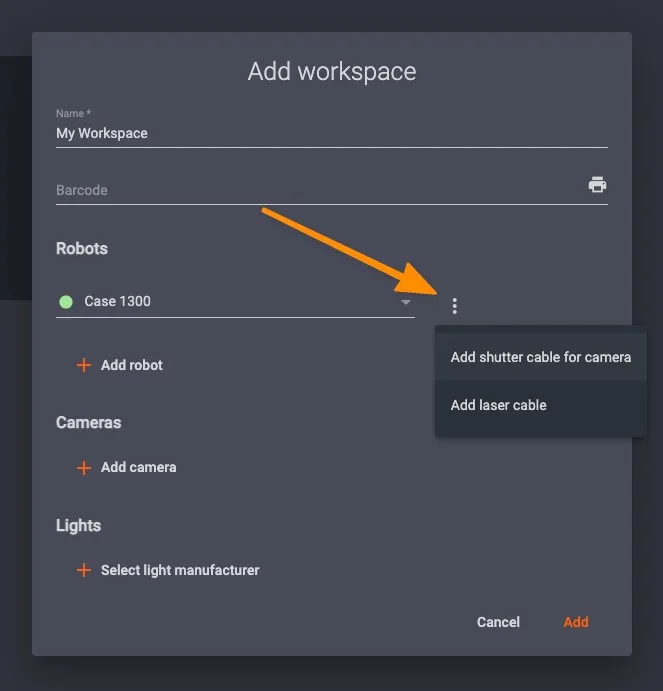
Um den Fast-Shot-Modus zu aktivieren, verbinden Sie alle Roboter über ein Verschlusskabel mit einer Kamera.
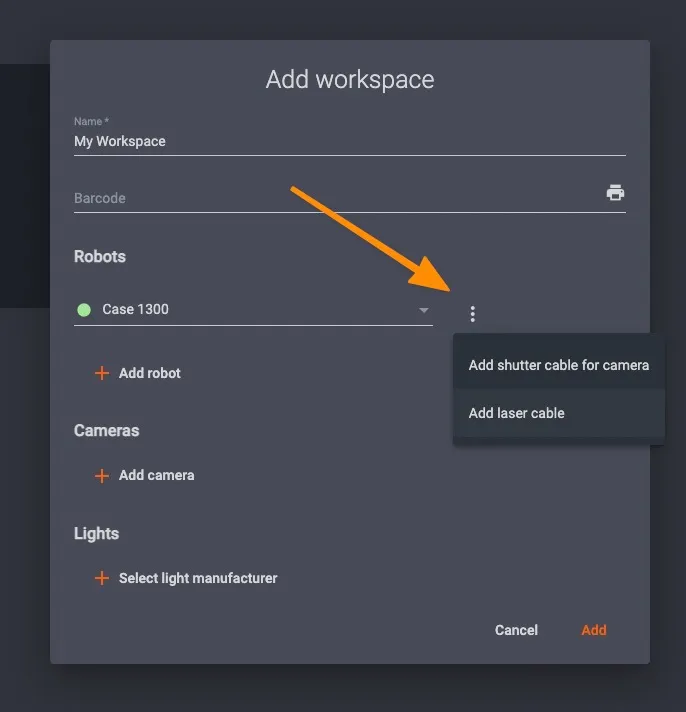
- Klicken Sie auf die drei vertikalen Punkte rechts neben dem Roboter, um das Kameramenü zu öffnen.
- Wählen Sie Shutterkabel für Kamera hinzufügen aus.
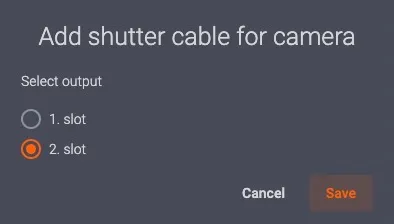
- Wählen Sie Ausgabesteckplatz (1 oder 2). Wählen Sie basierend auf der physischen Verkabelung Ihres Verschlusskabels aus, welcher Ausgangssteckplatz ausgewählt werden soll. Verwenden Sie für Kabel von PhotoRobot Steckplatz 2.
( ! ) - Für andere Hersteller könnte es notwendig sein, Schlitz 1 zu verwenden.
Laser konfigurieren
Je nach verwendeter Hardware gibt es mehrere Möglichkeiten, Laser zu konfigurieren:
Für eingebaute Laser
Sowohl der Case 850 als auch der 1300 verfügen über Lasersysteme, die ohne Konfiguration in den Roboter integriert sind.
20-Port-LaserBox
Die LaserBox mit 20 Anschlüssen ist ein eigenständiges Gerät, das die Steuerung mehrerer Laser über eine Netzwerkverbindung ermöglicht. Um die LaserBox zu konfigurieren, stellen Sie zunächst sicher, dass sie eingeschaltet ist, und fügen Sie sie dann als weiteren Roboter zum Arbeitsbereich hinzu:
4-Port-LaserBox
Wenn Sie eine LaserBox mit 4 Anschlüssen an Ihren Roboter angeschlossen haben, wählen Sie Laserkabel hinzufügen in den 3-Punkt-Menüpunkten rechts neben der ID des Roboters:
Kameras hinzufügen
Um eine Kamera hinzuzufügen, stellen Sie zunächst sicher, dass das Gerät eingeschaltet und über USB mit dem Computer verbunden ist. Wenn Sie keinen Roboter mit Schwenkfähigkeit verwenden (z. B. den Roboterarm oder den Rahmen), müssen Sie auch den Winkel einstellen, in dem die Kamera auf den Tisch zielt.
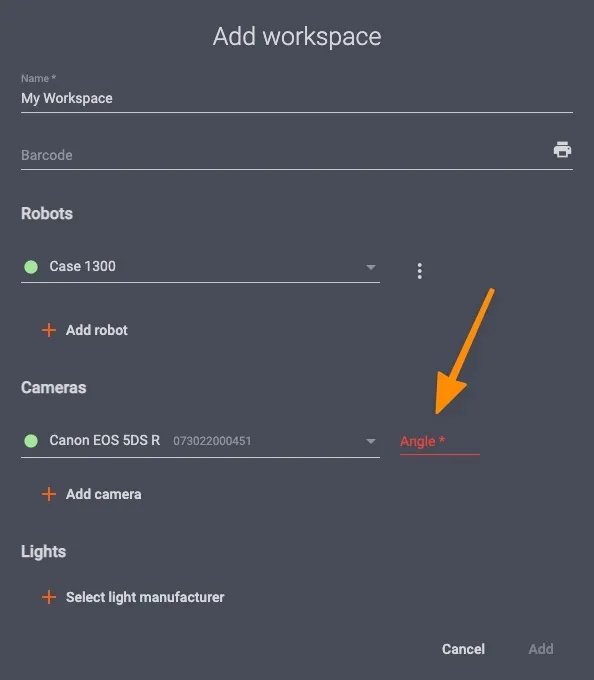
( ! ) - Das Einstellen des Winkels für Roboter ohne Schwingfähigkeit ist notwendig, damit bestimmte Funktionen wie die automatische Zentrierung funktionieren.
( * ) - Siehe die vollständige Liste der PhotoRobot-kompatiblen Kameras.
Lichter konfigurieren
Zu den mit PhotoRobot kompatiblen Lichtsystemen gehören zwei Arten von Leuchten: Stroboskopleuchten von FOMEI und Broncolor oder beliebige LED-Leuchten mit DMX-Unterstützung. Um eine Beleuchtungseinrichtung im Arbeitsbereichsmenü zu konfigurieren, gehen Sie zu Leuchten und fügen Sie kompatible Leuchten in Leuchtenhersteller auswählen hinzu.
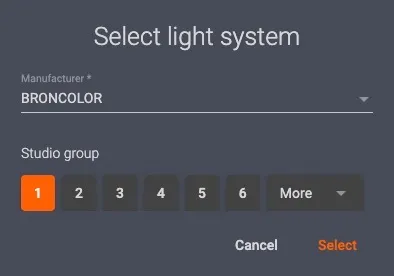
Stroboskoplichter – Broncolor
Um Broncolor-Leuchten einzurichten, wählen Sie zuerst BRONCOLOR und dann aus der Studio-Gruppe von Leuchten aus, die Sie steuern möchten:
Stroboskoplichter – FOMEI
Für Leuchten von FOMEI stehen Anwendern zwei Steuerungsmöglichkeiten zur Verfügung:
FOMEI LAN Transceiver (bevorzugte Methode)
Für die Steuerung von Lichtern über FOMEI LAN Transceiver, stellen Sie zuerst sicher, dass es online und mit Ihrem Netzwerk verbunden ist.
Als Nächstes wähle LAN aus. Dann wähle unten LAN im Dropdown-Menü Fomei LAN Transceiver.

FOMEI USB-Dongle (Legacy)
Es ist auch möglich, die Beleuchtung mit dem WiFi-Dongle von FOMEI zu steuern, der über USB direkt mit Ihrem Computer verbunden ist.
( ! ) Beachten Sie, dass diese Methode nicht mehr empfohlen wird. Dies liegt an der Tatsache, dass zusätzliche Treiber auf Ihrem Computer installiert werden müssen. FOMEI unterstützt auch keine neueren MacOS-Systeme mehr.
LED-Leuchten - DMX
Um LED-Leuchten zu steuern, die mit dem DMX-Protokoll kompatibel sind, schließen Sie die Leuchten über ein RJ45- oder USB-Kabel an den Roboter an.
Sie können dann Light Manufacturer DMX auswählen.
Später erstellen Sie ein individuelles Licht auf dem Capture-Bildschirm:
Für jede Leuchte können Sie zwei Kanäle konfigurieren:

- Der Helligkeitskanal ermöglicht die Steuerung der Helligkeitsstufe des ausgewählten Lichts.
- Der Farbkanal wird von einigen Lichtern unterstützt und ermöglicht die Anpassung der Farbstufen.


EOS Rebel Serie


EOS DSLR-Serie


EOS M spiegellose Serie


PowerShot-Serie


Nahaufnahme / Handheld

Die Canon EOS Rebel Serie bietet einsteigerfreundliche DSLR-Kameras mit solider Bildqualität, intuitiver Bedienung und vielseitigen Funktionen. Diese Kameras sind ideal für Fotografie-Enthusiasten und bieten zuverlässigen Autofokus, dreh- und schwenkbare Touchscreens sowie Full HD- oder 4K-Videoaufnahmen.
Verbindung
Auflösung (MP)
Auflösung
Die Canon EOS DSLR-Serie bietet hochwertige Bilder, einen schnellen Autofokus und Vielseitigkeit und ist damit ideal für die Fotografie und Videoproduktion.
Verbindung
Auflösung (MP)
Auflösung
Die spiegellose Canon EOS M Serie kombiniert kompaktes Design mit DSLR-ähnlicher Leistung. Mit austauschbaren Objektiven, schnellem Autofokus und hochwertigen Bildsensoren eignen sich diese Kameras hervorragend für Reisende und Content-Ersteller, die Mobilität suchen, ohne die Bildqualität zu beeinträchtigen.
Verbindung
Auflösung (MP)
Auflösung
Die Canon PowerShot-Serie bietet kompakte, benutzerfreundliche Kameras für Gelegenheitsfotografen und Enthusiasten. Mit Modellen, die von einfachen Point-and-Shoot-Kameras bis hin zu fortschrittlichen Zoomkameras reichen, bieten sie Komfort, solide Bildqualität und Funktionen wie Bildstabilisierung und 4K-Video.
Verbindung
Auflösung (MP)
Auflösung
Die Canon Nah- und Handkameras sind für detaillierte Nahaufnahmen und Videos konzipiert. Sie sind kompakt und einfach zu bedienen und bieten präzisen Fokus, hochauflösende Bildgebung und vielseitige Makrofunktionen – perfekt für Vlogging, Produktfotografie und kreative Nahaufnahmen.
Verbindung
Auflösung (MP)
Auflösung


