PhotoRobot SynchroBox – Funktionalität und Einrichtung Benutzerhandbuch

Die folgende Dokumentation beschreibt die Funktionalität und Einrichtung von PhotoRobot SynchroBox, dem Multi-Kamera-Controller, der die PhotoRobot MultiCam unterstützt. Diese Informationen sollen PhotoRobot-Kunden unterstützen, die kürzlich ein Gerät gekauft haben und mehr als eine Kamera mit PhotoRobot verwenden. Die SynchroBox fungiert als Multikamera-Hub, der den Kameraverschluss von zwei oder mehr Kameras synchronisiert. Lesen Sie weiter, um die Theorie, Funktionalität und Einrichtung der SynchroBox zu verstehen, die das grundlegende Verständnis und den ersten Betrieb des Geräts erleichtert.
Wichtig: Die Erstinstallation eines PhotoRobot-Systems muss stets von einer autorisierten PhotoRobot-Behörde durchgeführt werden. Behörden mit Genehmigung zur Installation von PhotoRobot sind ein zugelassener Vertriebspartner oder ein Vertreter des Herstellers selbst. Außerdem sollten Sie immer die PhotoRobot Safety Information & Instructions sowie etwaige speziell Ihrem Gerät beiliegende Handbücher konsultieren, bevor Sie PhotoRobot erstmals verwenden.
Hinweis: Für Anweisungen zur Montage und ersten Nutzung der PhotoRobot MultiCam siehe PhotoRobot MultiCam und Centerless Table Installation.
SynchroBox Technischer Benutzerhandbuch
Vielen Dank und herzlichen Glückwunsch zu Ihrem PhotoRobot-Kauf. PhotoRobot steht für jahrzehntelange praktische Berufserfahrung und Innovation in der automatisierten Fotografie. Jedes Gerät bietet ein Ökosystem aus fertigen Lösungen mit Funktionen, die auf die einzigartigen Bedürfnisse Ihres Unternehmens zugeschnitten sind.
Willkommen bei PhotoRobot. Nutzen Sie die folgenden technischen Informationen, um Ihre Reise zum Verständnis und zur Maximierung der Produktion im PhotoRobot-betriebenen Studio zu beginnen.
1. PhotoRobot SynchroBox – Die Theorie
Die PhotoRobot SynchroBox ist erforderlich, um den Kameraverschluss zu synchronisieren, wenn zwei oder mehr Kameras mit PhotoRobot-Systemen verwendet werden. SynchroBox fungiert als Multikamera-Hub, um die Aufnahme einzelner Bilder durch verschiedene Kameras genau zum richtigen Zeitpunkt zu synchronisieren. Sie stellt eine Lösung für das Problem dar, das bei Kameras mit unterschiedlichen Verschlussverzögerungen auftritt, und unterstützt insgesamt bis zu 8 Kameras.
Um die Theorie der SynchroBox zu verstehen, nehmen wir zum Beispiel die Sequenzen des Standard-Aufnahmemodus versus des Fast-Spin-Capture-Modus mit PhotoRobot.
Im Standard-Capture-Modus folgt folgende Sequenz.
a) Die Platte bewegt sich in den gewünschten Winkel.
b) Die Platte stoppt.
c) Die Kamera fotografiert das Objekt.
d) Die Platte beginnt, sich in den nächsten Winkel zu bewegen.
In diesem Szenario ist keine Anpassung nötig.
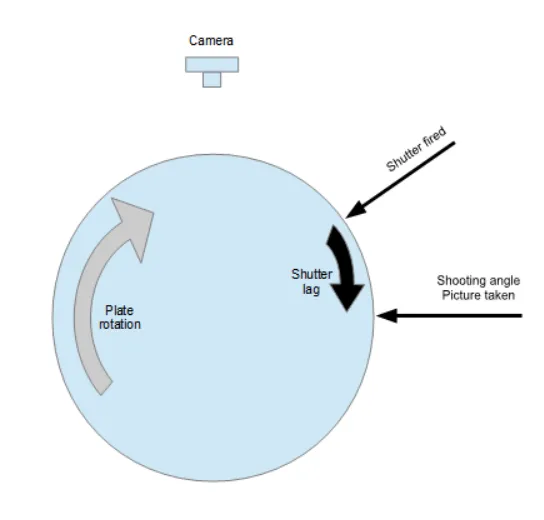
Im Fast-Spin-Capture-Modus benötigt die Sequenz mehrere weitere Stufen.
a) Die Platte beginnt, sich mit einer vordefinierten Geschwindigkeit zu drehen.
b) Die Steuereinheit erkennt, dass sich der Aufnahmewinkel nähert.
c) Die Steuereinheit feuert den Kameraverschluss im Voraus über das Verschlusskabel.
d) Die Kamera startet den Aufnahmeprozess (Bewegung des Sensorvorhangs usw.).
e) Der Aufnahmeprozess benötigt etwa 50 Millisekunden ("Verschlussverzögerung").
f) Die Platte ist während des Verschlussverzögerungszeitraums kontinuierlich in Bewegung.
g) Die Platte erreicht den gewünschten Winkel genau dann, wenn die Verschlussverzögerung der Kamera beendet ist und das Bild aufgenommen wird.
h) Die Steuereinheit erkennt, dass der nächste Aufnahmewinkel naht, und wiederholt den Aufnahmeprozess hinsichtlich der Verschlussverzögerung.
i) Die Plattenrotation endet nach 360 Grad, wodurch jegliche Bewegung gestoppt wird.
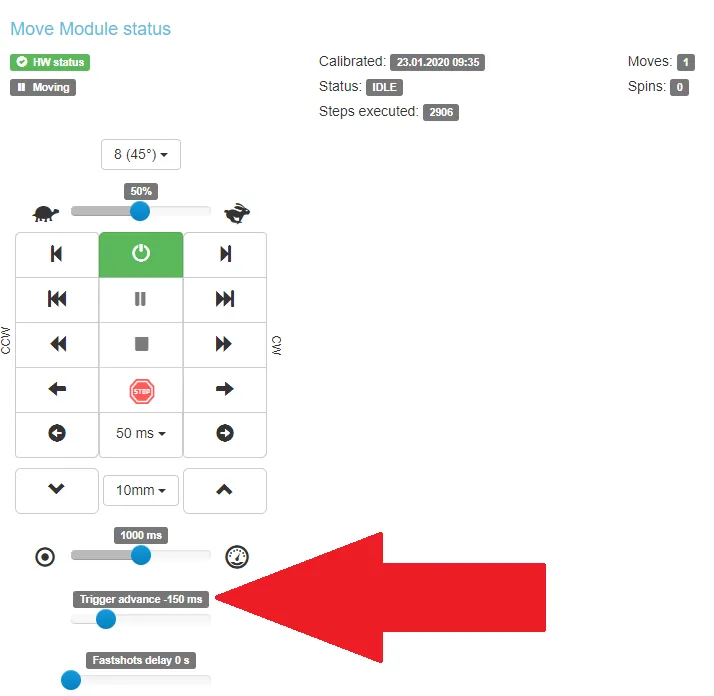
Anmerkung: Da jede Kamera eine unterschiedliche Verschlussverzögerung hat, ist es notwendig, den Verschlussvorschuss der Steuereinheit für jede einzelne Kamera anzupassen. Dies ist für die Steuereinheit (Generation 6) über deren Service-GUI mit der Option "Trigger-Vorschub" möglich. Der Wert "Trigger Advance" muss höher sein als die Verschlussverzögerung der Kamera. Wenn zum Beispiel die Verschlussverzögerung der Kamera 80 ms beträgt, sollte der "Triggervorschub" ungefähr gleich oder größer als 90 ms sein.
2. Gerätebeschreibung – PhotoRobot SynchroBox
Die SynchroBox ist von Natur aus ein Rackmount-Gerät, das zur Synchronisation der Kameraverschlüsse von zwei oder mehr Kameras entwickelt wurde. Sie ist notwendig, wenn ein PhotoRobot-System mit mehr als einer Kamera gleichzeitig betrieben wird. One SynchroBox unterstützt bis zu 8 Kameras und bietet eine Lösung, um verschiedene Verschlussverzögerungen der verwendeten Kameras zu umgehen.


Nehmen wir zum Beispiel ein Szenario mit zwei Kameras und einer SynchroBox nur als Splitter für beide Kameras, ohne zusätzliche Einrichtung. Gleichzeitig ist der "Trigger Advance"-Wert der Steuereinheit G6 null. Der Verschluss wird dann gezündet, wenn die Platte den gewünschten Winkel erreicht.
In diesem Fall sind die Schritte der Folge:
a) Die Platte erreicht den gewünschten Winkel.
b) Die Steuereinheit zündet den Kameraverschluss über das Verschlusskabel.
c) Die Verschlussverzögerung beider Kameras zählt herunter, während sich die Platte kontinuierlich bewegt.
d) Die erste Kamera macht das Bild 50 ms nach dem gewünschten Aufnahmepunkt mit "gewünschtem Winkel + X" Grad.
e) Die zweite Kamera nimmt das Bild 70 ms nach dem gewünschten Aufnahmepunkt mit "gewünschten Winkel + Y" Grad auf.
f) Die "Y"-Wert-Grade sind größer als die "X"-Wert-Grade.
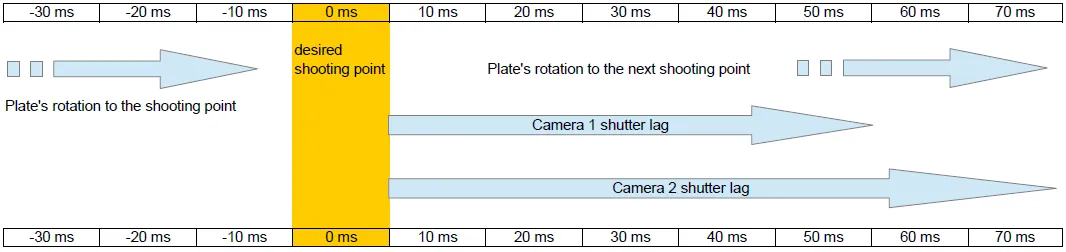
Daher wird kein Bild des gewünschten Winkels aufgenommen. Daher ist eine Anpassung notwendig, damit beide Kameras den gewünschten Aufnahmepunkt zum richtigen Zeitpunkt fotografieren.
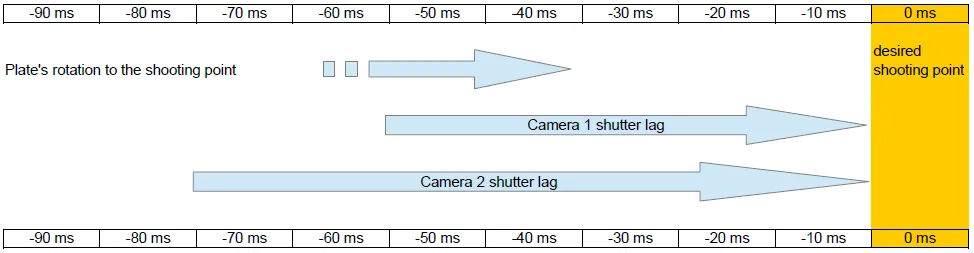
Dafür empfängt die SynchroBox einen "Verschluss abgefeuerten" Impuls von der Steuereinheit G6 und identifiziert automatisch die Länge des Impulses.
Zusätzlich hat die SynchroBox den Verschlussverzögerungswert für jede angeschlossene Kamera, der bei der Einrichtung manuell eingegeben wurde.
Mit diesen beiden Parametern zählt und zündet die SynchroBox den Verschluss jeder Kamera mit dem entsprechenden Vorlauf.
3. Wie man die Verschlussverzögerung der Kamera misst
Um die Verschlussverzögerung der Kamera zu messen, ist es notwendig, einen PhotoRobot mit beliebiger rotierender Platte, die Steuereinheit G6+ und eine Kamera über Verschlusskabel mit der Steuereinheit zu verbinden.
Als nächstes muss ein lokaler Computer mit PhotoRobot Controls App Software per USB-Kabel mit der Kamera verbunden werden.
Schließlich ist ein 360-Grad-Winkelmesser (online herunterladbar) notwendig, um die folgenden Schritte zu erfüllen.
a) Setzen Sie den Winkelmesser auf die PhotoRobot-Geräteplatte und verwenden Sie einen beliebigen Zeiger, der außerhalb der Platte positioniert ist und auf den Rand zeigt.
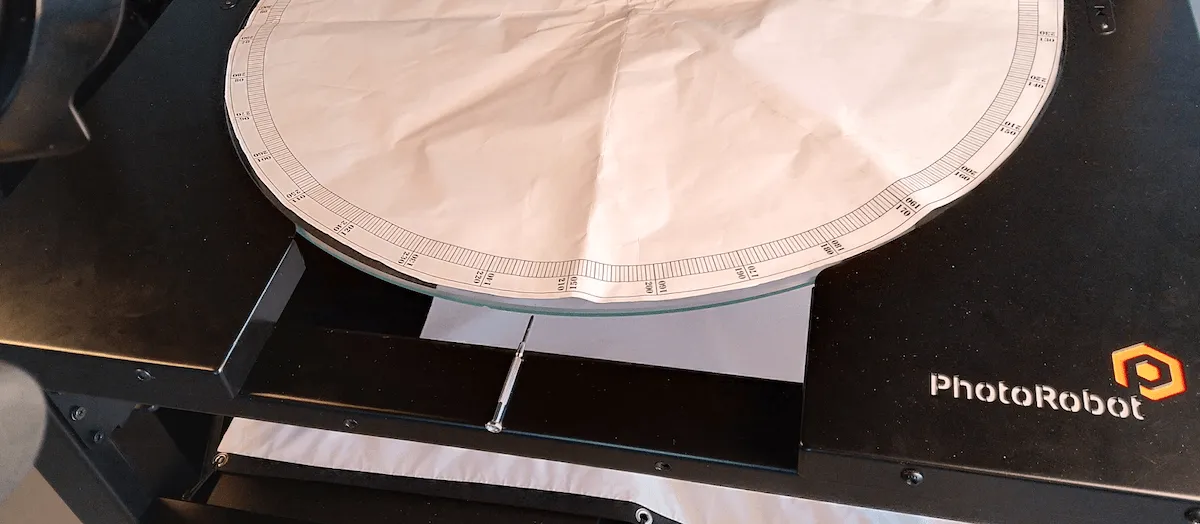
b) Drehen Sie die Platte, bis der Zeiger auf null steht. Hinweis: Dieser Schritt ist auch dann von Hand möglich, wenn die Elektromotoren ausgeschaltet sind.
c) Starte die PhotoRobot Controls App-Software, melde dich in dein Konto an und erstelle einen Artikel über den Arbeitsbereich, wobei du die angegebene Konfiguration im Blick hast. Dann öffne den Capture-Modus und öffne den Ordner "Sonstiges".
d) Öffne als Nächstes in einem neuen Tab in deinem Browser die Service-GUI der Control Unit (G6), die die Kontrolle über die Platte über deren IP-Adresse ermöglicht.
e) Im Service-GUI richten Sie den Roboter mit folgenden Parametern ein:
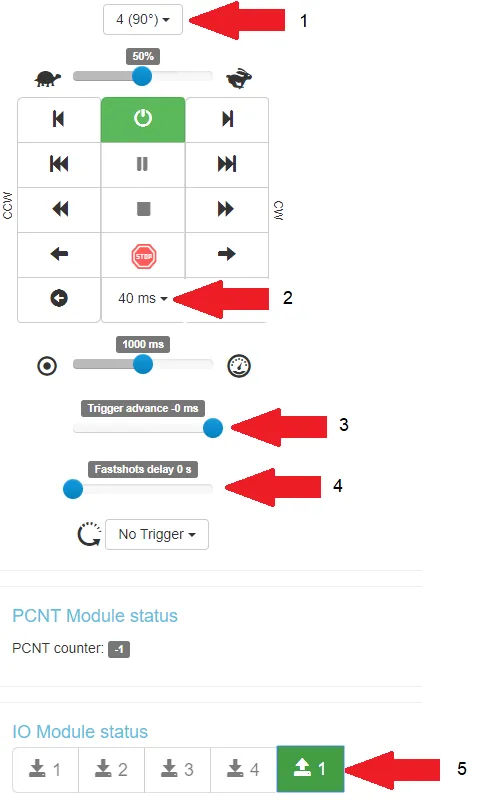
- 1 = 4 Bilder mal 90 Grad;
- 2 = 40 ms Pulslänge zum Auslösen des Verschlusses;
- 3 = Trigger-Vorlauf 0 ms (kein Vorschub);
- 4 = keine Verzögerung für Fastshots
- 5 = Halbdruck des Verschlusses wird aktiviert
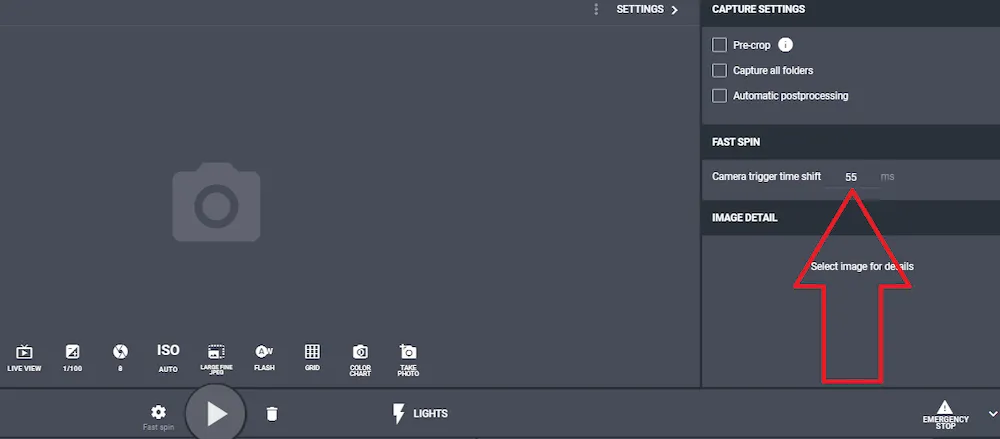
f) Starte die Sequenz, indem du auf den rechten Pfeil unten rechts im Bedienfeld klickst:
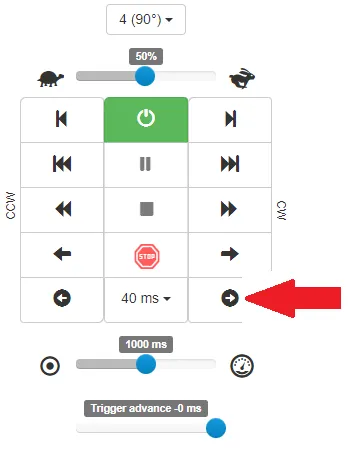
Anmerkung: Die Sequenz beginnt bei 90 Grad und endet bei 0 Grad. Gleichzeitig werden alle Fotos im Ordner "Sonstiges" in der Steuerungs-App aufgenommen, wie zuvor konfiguriert.
Siehe zum Beispiel die folgenden Sample-Ausgänge (mit einer Drehrichtung nach links):
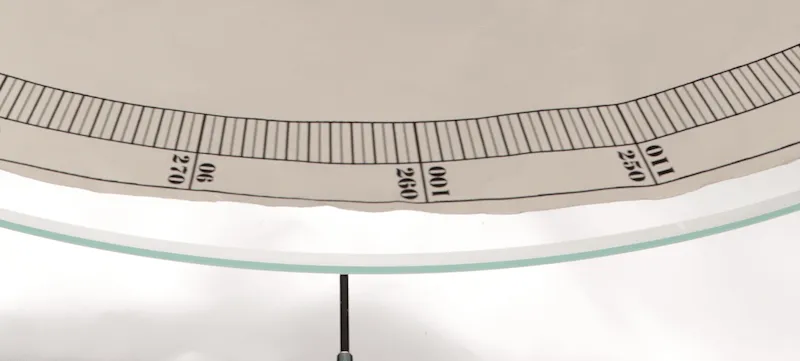
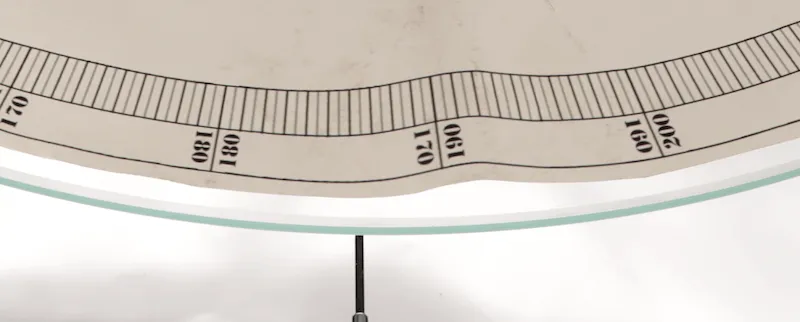
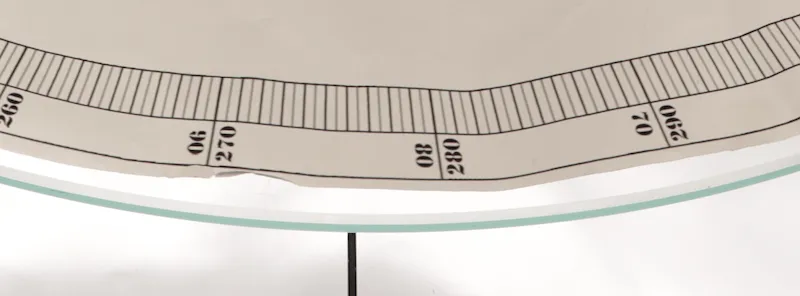
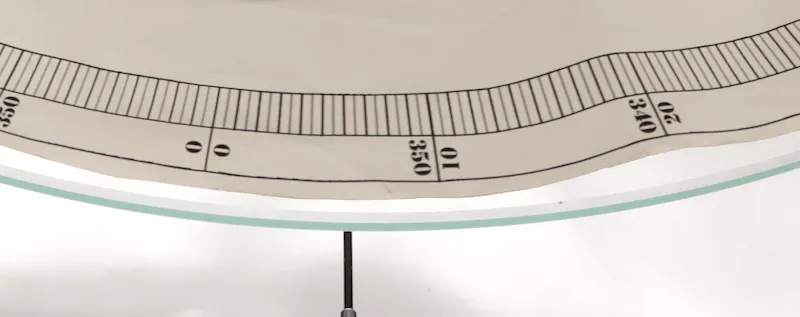
- Anmerkung: In diesen Beispielen erfolgte die Bildaufnahme etwa 6 Grad nach dem Auslösen des Abzugs.
g) Um 6 Grad in die Anzahl der Millisekunden (ms) umzuwandeln, in diesem Fall die kontinuierliche Rotation der PhotoRobot-Platte mit derselben Geschwindigkeit wie im vorherigen Schritt der Service-GUI zu starten.
- Starte eine Stoppuhr und notiere die Zeit für 10 Runden.
- In diesem Testfall beträgt der resultierende Wert 61 Sekunden (61.000 ms).
- Das bedeutet, dass 10 Schuss gleich 10 * 360 Grad (3.600 Grad) sind.
- Es gibt eine 1-Grad-Zeitbewegung von 61.000 ms / 3.600 Grad, was 16,94 ms entspricht.
- Es gibt eine Zeitbewegung von 6 Grad, die 16,94 ms * 6 dauert, was 101,64 ms entspricht.
- Daher beträgt die ungefähre Verschlussverzögerung etwa 102 ms.
h) Schließlich ist es notwendig, alle vorherigen Schritte zu wiederholen, um die Verschlussverzögerung für jede verwendete Kamera zu bestimmen.
4. SynchroBox-Aufbau
Für den Aufbau der SynchroBox ist eine Voraussetzung für eine installierte und voll funktionsfähige Steuereinheit (G6). Außerdem sollten idealerweise zwei oder mehr Kameras desselben Herstellers und desselben Modells vorhanden sein, jeweils mit bekannter Verschlussverzögerung.
In diesem Fall verwenden Sie die folgenden Schritte, um die SynchroBox einzurichten.
4.1. Verbinden Sie die SynchroBox über Verschlusskabel mit der Steuereinheit G6. Hinweis: Dieses Verschlusskabel wird von PhotoRobot als Teil der SynchroBox-Lieferung bereitgestellt oder unter der Teilenummer KHCAR1R05. Das Verschlusskabel verbindet den Control Unit G6 "OUT"-Anschluss mit dem SynchroBox "->IN"-Anschluss (dem kleineren, nicht dem anderen "=>IN").
4.2. Verbinden Sie die SynchroBox mit dem Netzwerk über ein Standard-Ethernet-Kabel, wobei dasselbe Subnetz mit der Steuereinheit verbunden ist.
4.3. Schließen Sie alle Kameras, die in Betrieb sind, über Verschlusskabel mit der SynchroBox an.
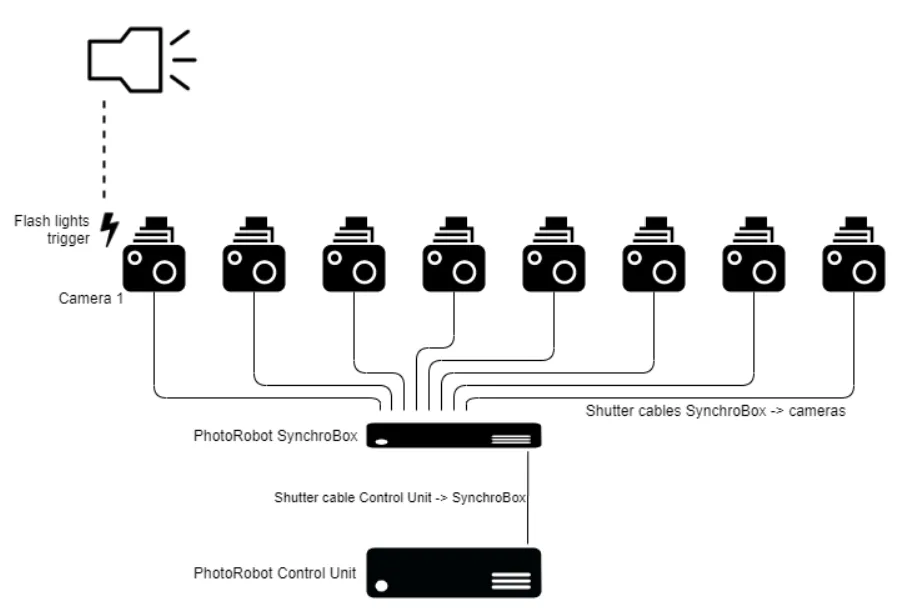
Anmerkung: Die Verschlusskabel für die SynchroBox an die Kameras werden von PhotoRobot unter den Teilenummern KHCARCJ (Canon Jack 2,5 mm Connector) oder KHCARN3 (Canon N3-Stecker) plus der Verlängerung KHCAR1R05 geliefert, oder als sogenannter Verschlusskabelsatz.

4.4. Beachten Sie, dass Kamera 1 (Port 1 der SynchroBox) das Blitzlicht-Auslösegerät hält und bedient. Diese Kamera muss die größte Verschlussverzögerung haben.
4.5. Richten Sie den Wert der Steuereinheit (G6) "Trigger Advance" entsprechend der Verschlussverzögerung der langsamsten Kamera ein (zuvor in Abschnitt 1 dieses Dokuments beschrieben). Hinweis: Wenn Sie die PhotoRobot Controls App verwenden, beachten Sie, dass dieser Wert durch den für den Capture-Modus gesetzten Wert – Fast Spin – angepasst oder ersetzt wird:
4.6. Als Nächstes greifen Sie auf die Service-GUI der SynchroBox zu, indem Sie deren IP-Adresse im URL-Format in Ihren Webbrowser eingeben.
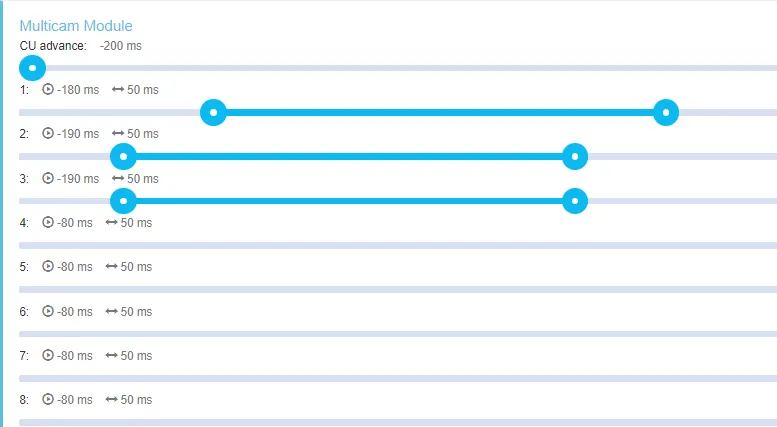
4.7. Richten Sie den ersten Schieberegler "CU Advance" auf denselben Wert wie in der Control Unit oder auf einen entsprechenden Wert in PhotoRobot Controls ein. Hinweis: Beachten Sie, dass bei unterschiedlichen Werten der Wert in PhotoRobot Controls Vorrang hat. Dann gibt es 8 Schieberegler, die den 8 Ports der SynchroBox entsprechen. Die Schieberegler haben jeweils zwei Werte: den Vorschalter (linker Knopf) und die Pulslänge (rechter Knopf). Der erweiterte Wert entspricht der Verschlussverzögerung der gesteuerten Kamera (wobei der kleinste reale Wert etwa -50 ms beträgt). Die Pulslänge hängt dann mit dem Zeitraum zusammen, in dem das Verschlusskabel der Kamera den Kontakt hält. Dieser Wert wird vom Kamerahersteller bereitgestellt oder, falls unbekannt, auf 40 bis 60 ms eingestellt.
4.8. Richten Sie den Eingangskanal in der SynchroBox-Service-GUI ein. Hinweis: Bei Verwendung der Verschlusskabel von PhotoRobot ist die Konfiguration immer wie folgt.
- Im Hafen: A = Fokus, B = Auslöser
- Port 1 - 8: A = Auslöser, B = Fokus
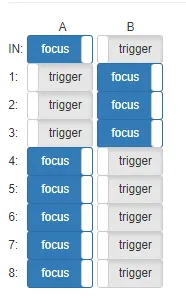
- Beachten Sie, dass im obigen Beispiel nur die Kameras 1, 2 und 3 aufgebaut sind.
- Da PhotoRobot für Blitzlichter gedacht ist, stellen Sie die Verschlusszeit der Kamera 1 auf 1/100 oder 1/125 ein.
4.9. Konfigurieren Sie schließlich die Anfangseinstellung aller anderen Kameras auf eine deutlich längere Verschlusszeit, z. B. 1/30 - 1/60. Das hilft, den möglichen Unterschied in den Verschlussverzögerungen zwischen den verwendeten Kameras auszugleichen. Der längere Zeitraum stellt außerdem sicher, dass alle Kameras den Höhepunkt des Blitzes aller Stroboskop erreichen. Bei korrekter Funktionsweise ist es dann möglich, bei Bedarf die Verschlusszeit der anderen Kameras zu reduzieren.
5. Mehrfach-SynchroBox-Aufbau
Die SynchroBox unterstützt bis zu einer maximalen Anzahl von 8 Kameras. Wenn mehr als 8 Kameras benötigt werden, ist es möglich, die Anzahl der verwendeten SynchroBoxen zu vervielfachen.

- Verbinden Sie den OUT-Port der ersten SynchroBox mit dem IN-Port der nächsten SynchroBox und verwenden Sie dasselbe Verschlusskabel, das auch die Steuereinheit mit der SynchroBox verbindet. Dieses Verschlusskabel wird von PhotoRobot als Teil der SynchroBox-Lieferung oder unter der Teilenummer KHCAR1R05 bereitgestellt.


EOS Rebel Serie


EOS DSLR-Serie


EOS M spiegellose Serie


PowerShot-Serie


Nahaufnahme / Handheld

Die Canon EOS Rebel Serie bietet einsteigerfreundliche DSLR-Kameras mit solider Bildqualität, intuitiver Bedienung und vielseitigen Funktionen. Diese Kameras sind ideal für Fotografie-Enthusiasten und bieten zuverlässigen Autofokus, dreh- und schwenkbare Touchscreens sowie Full HD- oder 4K-Videoaufnahmen.
Verbindung
Auflösung (MP)
Auflösung
Die Canon EOS DSLR-Serie bietet hochwertige Bilder, einen schnellen Autofokus und Vielseitigkeit und ist damit ideal für die Fotografie und Videoproduktion.
Verbindung
Auflösung (MP)
Auflösung
Die spiegellose Canon EOS M Serie kombiniert kompaktes Design mit DSLR-ähnlicher Leistung. Mit austauschbaren Objektiven, schnellem Autofokus und hochwertigen Bildsensoren eignen sich diese Kameras hervorragend für Reisende und Content-Ersteller, die Mobilität suchen, ohne die Bildqualität zu beeinträchtigen.
Verbindung
Auflösung (MP)
Auflösung
Die Canon PowerShot-Serie bietet kompakte, benutzerfreundliche Kameras für Gelegenheitsfotografen und Enthusiasten. Mit Modellen, die von einfachen Point-and-Shoot-Kameras bis hin zu fortschrittlichen Zoomkameras reichen, bieten sie Komfort, solide Bildqualität und Funktionen wie Bildstabilisierung und 4K-Video.
Verbindung
Auflösung (MP)
Auflösung
Die Canon Nah- und Handkameras sind für detaillierte Nahaufnahmen und Videos konzipiert. Sie sind kompakt und einfach zu bedienen und bieten präzisen Fokus, hochauflösende Bildgebung und vielseitige Makrofunktionen – perfekt für Vlogging, Produktfotografie und kreative Nahaufnahmen.
Verbindung
Auflösung (MP)
Auflösung


